
Un système de jumeau numérique qui pourrait améliorer l’assemblage collaboratif de produits homme-robot
Crédit : Zhang et al. (Robotique et fabrication intégrée par ordinateur)
Les systèmes robotiques ont déjà été introduits dans de nombreux contextes du monde réel, notamment dans certaines installations industrielles et manufacturières. Dans ces installations, les robots peuvent assister les employés humains des chaînes de montage et des entrepôts, en assemblant certaines parties des produits avec une grande précision, puis en les remettant à des agents humains chargés d'effectuer des actions supplémentaires.
Ces dernières années, les roboticiens et les informaticiens ont tenté de développer des systèmes de plus en plus avancés qui pourraient améliorer ces interactions entre les robots et les humains en milieu industriel. Certaines solutions proposées s'appuient sur des systèmes dits de « jumeaux numériques », des modèles virtuels conçus pour reproduire avec précision un objet physique, tel que des produits ou des composants spécifiques en cours de fabrication.
Des chercheurs de l'Université d'aéronautique et d'astronautique de Nanjing en Chine ont récemment introduit un nouveau système de jumeau numérique qui pourrait améliorer la collaboration entre les agents humains et robotiques dans les environnements de fabrication. Ce système, présenté dans un article publié dans Robotique et fabrication intégrée par ordinateurpeut créer une carte virtuelle des environnements du monde réel pour planifier et exécuter les comportements appropriés des robots lorsqu'ils coopèrent avec les humains sur une tâche donnée.
“Dans les environnements industriels, les méthodes actuelles de construction d'un modèle de jumeau numérique humain reposent sur des dispositifs de capture de mouvement qui obligent le personnel à porter un équipement encombrant, ce qui va à l'encontre du principe d'interaction flexible préconisé pour le HRC”, ont écrit Zequn Zhang, Yuchen Ji et leurs collègues. dans leur journal.
“De plus, les méthodes actuelles ne modélisent pas les humains et les robots dans un espace unifié, ce qui est à la fois peu intuitif et peu pratique pour percevoir et comprendre l'environnement global. Pour remédier à ces limitations, cet article propose un système de jumeau numérique pour HRC.”
Le système de jumeau numérique créé par Zhang, Ji et leurs collègues crée une réplique virtuelle d'une scène dans laquelle un agent humain et un robot collaborent. Par la suite, il planifie des stratégies de collaboration efficaces et les exécute dans un environnement réel.
Il a été constaté que les systèmes de jumeaux numériques précédemment proposés qui s'appuient sur les données collectées par des capteurs de capture de mouvement obtiennent parfois des résultats insatisfaisants en présence d'occlusions (c'est-à-dire lorsque des objets ou des agents d'intérêt se trouvent en dehors du champ de vision des capteurs ou sont cachés derrière des obstacles). ). Les chercheurs ont ainsi développé un algorithme de récupération du maillage humain, une technique informatique pouvant aider à reconstruire des corps humains occlus.
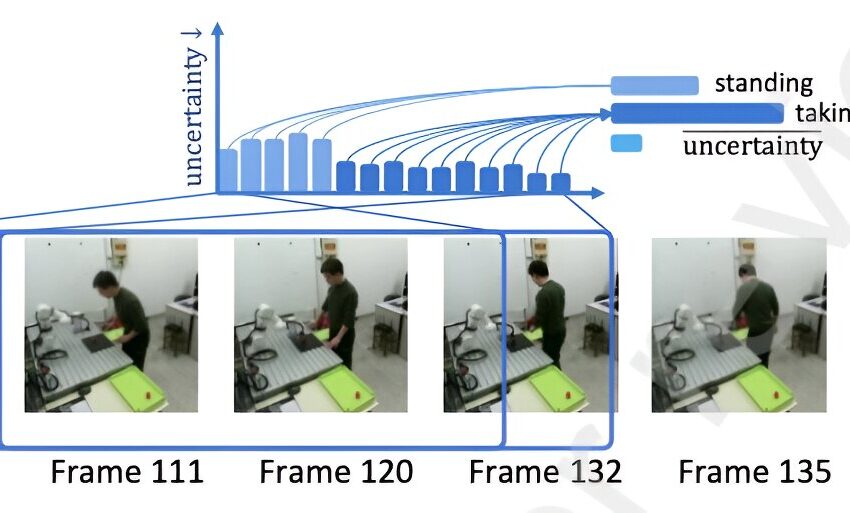
De plus, Zhang, Ji et leurs collègues ont introduit une technique d'estimation de l'incertitude dans leur système. Cette technique leur permet d'améliorer les performances de l'algorithme de reconnaissance d'actions, un composant de leur système entraîné à reconnaître différentes actions humaines, en contrôlant le risque que cet algorithme commette des erreurs.
Les chercheurs ont évalué leur nouveau système de jumeau numérique dans une série d’expériences en laboratoire, à l’aide d’un robot conçu pour être déployé en milieu industriel. Leur système s'est avéré améliorer la collaboration entre ce robot et un agent humain dans diverses tâches, y compris des tâches impliquant le polissage, le ramassage, l'assemblage et le dépôt d'objets.
“Les résultats expérimentaux démontrent la supériorité des méthodes proposées par rapport aux méthodes de base”, ont déclaré Zhang, Ji et leurs collègues. “Enfin, la faisabilité et l'efficacité du système HRC sont validées par une étude de cas impliquant l'assemblage de composants.”
Le système de jumeau numérique développé par Zhang, Ji et leurs collègues pourrait bientôt être implémenté sur d'autres robots à usage industriel et testé plus en détail dans le cadre d'expériences supplémentaires. À terme, il pourrait être introduit dans des contextes réels, pour améliorer la collaboration entre les robots et les humains. sur diverses tâches manufacturières et industrielles.
Plus d'information:
Zequn Zhang et al, Permettre un assemblage collaboratif entre humains et robots à l'aide d'un système de jumeau numérique, Robotique et fabrication intégrée par ordinateur (2023). DOI : 10.1016/j.rcim.2023.102691.
© 2023 Réseau Science X
Citation: Un système de jumeau numérique qui pourrait améliorer l'assemblage collaboratif de produits homme-robot (17 décembre 2023) récupéré le 18 décembre 2023 sur
Ce document est soumis au droit d'auteur. En dehors de toute utilisation équitable à des fins d'étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.