
Un robot lézard bio-inspiré révèle ce qui est nécessaire pour une locomotion optimale
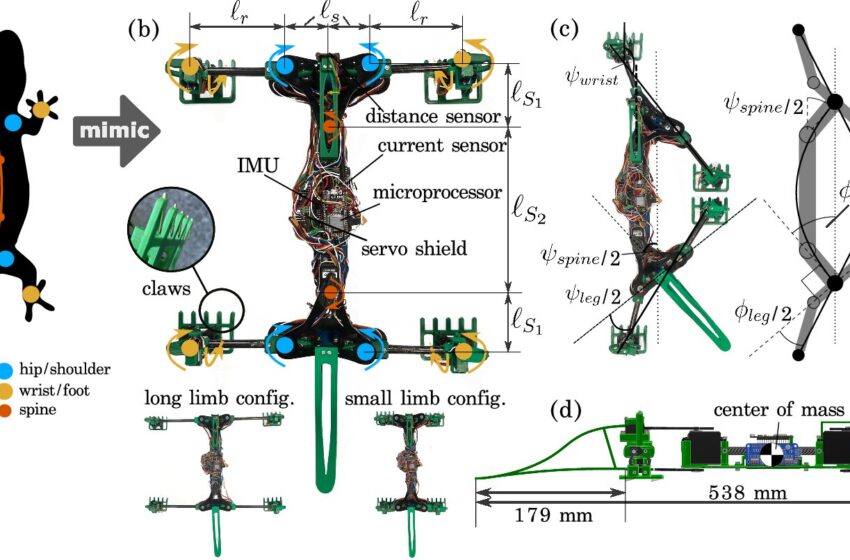
Abstraction et illustration technique du robot SQUAMATAR. Crédits : npj robotique (2024). DOI : 10.1038/s44182-024-00011-2
Un robot imitant un lézard grimpeur et marchant peut-il apporter de nouvelles perspectives sur l’évolution et les avantages des différents mouvements chez les humains et d’autres animaux ?
La réponse est oui, selon une nouvelle étude internationale et interdisciplinaire publiée dans npj robotiqueco-écrit par le Dr Christofer Clemente de l’Université de la Sunshine Coast.
« Ces découvertes pourraient également nous aider à construire des robots à pattes plus rapides et plus efficaces », a déclaré le Dr Clemente, spécialisé dans la biomécanique des animaux vivants et éteints.
« Cela pourrait un jour s’avérer important pour franchir les obstacles afin de retrouver des survivants lors des missions de recherche et de sauvetage. »
« Notre équipe de recherche a développé un robot inspiré du lézard, capable de courir et de grimper, et a combiné la biologie, la robotique et les mathématiques basées sur la locomotion du lézard pour comprendre s’il était préférable de se déplacer avec les jambes ou la colonne vertébrale », a déclaré le Dr Clemente.
« Nous avons constaté que pour se déplacer rapidement, il faut utiliser principalement les jambes et bouger le moins possible la colonne vertébrale. Mais utiliser un peu la colonne vertébrale permet de dépenser moins d’énergie.
« Nous avons également constaté que le fait de trop bouger les membres ou la colonne vertébrale avait tendance à diminuer la stabilité pendant l’escalade, ce qui signifie que les robots étaient plus susceptibles de tomber du mur. »
Les lézards sont des maîtres de la locomotion
L’auteur principal, le Dr Robert Rockenfeller de l’Université de Coblence, a déclaré que dans l’ensemble, ils ont constaté qu’une locomotion optimale nécessitait à la fois des mouvements de la colonne vertébrale et des membres, ce qui correspond étroitement aux schémas de mouvement des lézards.
« Les résultats permettent de détailler l’étendue des compromis évolutifs entre trois critères de performance clés – la vitesse, l’efficacité et la stabilité – et de déterminer la force relative de ces pressions de sélection sur la locomotion », a déclaré le Dr Rockenfeller.
Le Dr Clemente a déclaré que parmi les vertébrés, les schémas de mouvement varient considérablement, depuis les mouvements latéraux basés sur la colonne vertébrale des poissons et des salamandres jusqu’aux mouvements principalement basés sur les membres des mammifères et des oiseaux.
« Cependant, les lézards utilisent à la fois leurs membres et leurs épines, ce qui en fait l’espèce parfaite à étudier pour aider à combler les lacunes dans la compréhension des raisons pour lesquelles ces changements ont pu se produire », a-t-il déclaré.
Le robot inspiré du lézard de l’équipe de recherche était capable de courir à niveau et de grimper sur des surfaces inclinées ou verticales, avec des longueurs de jambes modifiables et la possibilité d’ajuster l’amplitude de mouvement de sa colonne vertébrale et de ses membres ainsi que la vitesse de sa foulée.
. DOI : 10.1038/s44182-024-00011-2")
Données cinématiques recueillies lors de l’escalade et de la marche à niveau auprès de 44 espèces présentant différents plans corporels en utilisant le suivi du mouvement des points du corps qui ont ensuite été utilisés pour calculer l’amplitude des mouvements des membres et de la colonne vertébrale. Crédit : npj robotique (2024). DOI : 10.1038/s44182-024-00011-2
« Nous avons également construit un paysage de performance pour évaluer son efficacité en escalade et sa stabilité », a déclaré le Dr Clemente.
« Ces données ont été cartographiées à l’aide des résultats d’un modèle théorique bidimensionnel de la locomotion des lézards ainsi que des mesures de plus de 40 espèces de lézards grimpeurs et coureurs.
« Nous avons pu déterminer plusieurs critères d’ingénierie à prendre en compte lors du développement de dispositifs robotisés dotés de membres capables de traverser une grande variété d’environnements. »
« L’ondulation latérale de la colonne vertébrale ne doit pas nécessairement être une considération importante si la maximisation de la vitesse du robot est l’objectif principal, mais elle peut être importante pour réduire la consommation d’énergie. »
De même, cette compréhension peut également aider à concevoir des foulées robotiques plus rapides, plus stables et plus efficaces.
Plus d’information:
Robert Rockenfeller et al., Coordination des membres et de la colonne vertébrale : locomotion (Pareto-)optimale en théorie, in vivo et dans les robots, npj robotique (2024). DOI : 10.1038/s44182-024-00011-2
Fourni par l’Université de la Sunshine Coast
Citation: Un robot lézard bio-inspiré révèle ce qui est nécessaire pour une locomotion optimale (2024, 22 juillet) récupéré le 22 juillet 2024 à partir de
Ce document est soumis au droit d’auteur. En dehors de toute utilisation équitable à des fins d’étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni à titre d’information uniquement.