
Le ponçage de l’isolation cachée se traduit par une méthode plus fiable pour mesurer la réception du toucher robotique
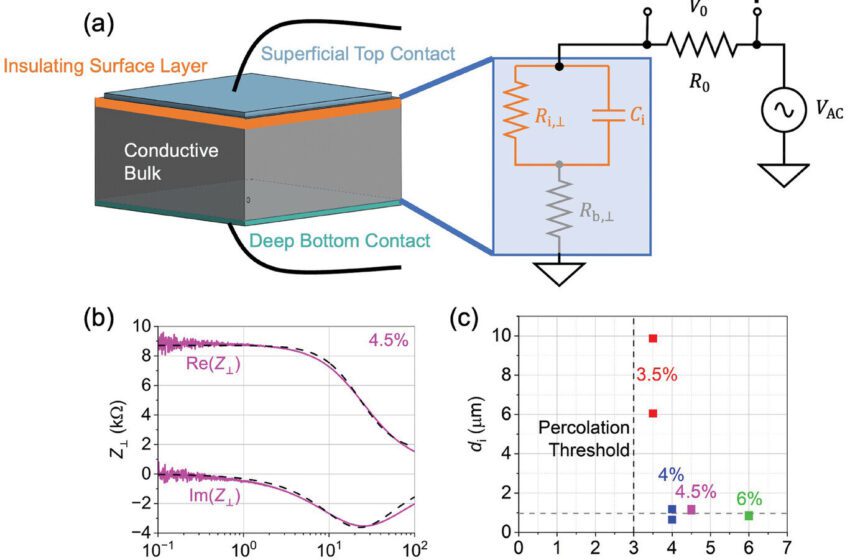
Caractérisation électrique de la conductivité et de l’épaisseur de la couche de surface isolante. Crédit: Matériaux électroniques avancés (2025). Doi: 10.1002 / aelm.202400848
Des chercheurs de la Northwestern University et de l’Université Tel Aviv d’Israël ont surmonté un obstacle majeur à la réalisation d’une solution à faible coût pour une touche robotique avancée. Les auteurs soutiennent que le problème qui s’est caché dans les marges de nombreux articles sur les capteurs tactiles réside dans la peau robotique elle-même.
Dans l’étude, les composites en caoutchouc de silicium bon marché utilisés pour fabriquer la peau ont été observés pour héberger une couche isolante sur les surfaces supérieure et inférieure, ce qui a empêché le contact électrique direct entre le polymère de détection et les électrodes de surface de surveillance, ce qui rend les mesures précises et reproductibles pratiquement impossibles.
Avec l’erreur éliminée, les peaux robotiques bon marché pourraient permettre aux robots d’imiter le toucher humain, leur permettant de détecter les courbes et les bords d’un objet, ce qui est nécessaire pour le saisir correctement.
Dans un article publié dans la revue Matériaux électroniques avancésune équipe interdisciplinaire de chercheurs qui associe des ingénieurs électriciens avec des scientifiques des matériaux en polymère met en lumière ce problème et fournit une voie à suivre avec des étapes pratiques pour valider les contacts électriques, qui pourraient être sans le savoir obscurcissant les performances des dispositifs, selon la McCormick School of Engineering de Northwestern.
“Beaucoup de scientifiques comprennent mal leur réponse du capteur parce qu’ils regroupent le comportement des contacts avec le comportement du matériau du capteur, entraînant des données incohérentes”, a déclaré Grayson.
“Il s’avère que si vous n’êtes pas au courant de ce problème, vous pouvez publier des articles que personne ne peut reproduire. Notre travail identifie le problème exact, quantifie son étendue à la fois microscopiquement et électriquement, et donne un manuel de mise au point étape par étape pour résoudre le problème.”
Le caoutchouc qui peut être utilisé pour la peau robotique typique, appelée élastomère, est flexible, léger et peu coûteux, et lorsqu’ils conduisaient électriquement des charges comme des nanotubes de carbone sont ajoutés au mélange, le composite résultant devient un candidat idéal pour un capteur tactile, dont la résistance change localement lorsqu’elle est pressée.
Mais pour recevoir des signaux électriques, les capteurs doivent être contactés électriquement et les chercheurs ont détecté une couche isolante mince toujours présente dans de tels composites qui pourraient changer considérablement le comportement des contacts.
Juste en ponçonnant la couche d’isolation ultramine, l’équipe a pu obtenir un contact électrique beaucoup plus fort et calibrer l’épaisseur de la couche isolante à la fois électriquement et microscopique.
“Toutes les choses intéressantes se produisent à l’interface”, a déclaré le co-auteur et professeur à l’Université de Tel Aviv Noa Lachman. “Cette publication montre non seulement l’importance des interfaces de capteurs, mais aussi l’importance de travailler au lien entre deux disciplines différentes: la science des matériaux et le génie électrique.
“Les experts des matériaux soupçonnaient la présence de cette couche externe isolante dans des composites en polymère conducteur pendant des années, mais ne pouvaient pas comprendre ses effets électriques. Chacun de nous a une pièce du puzzle, mais seulement ensemble pouvons-nous avoir toute la situation.”
La robotique en particulier peut être difficile en partie car elle nécessite de nombreux types d’expertise. Le scientifique des matériaux polymères concevant le matériau électronique fonctionnel pour un robot, par exemple, n’a pas la même formation et les mêmes compétences que l’ingénieur électricien dont l’électronique traitera les signaux du capteur. Grayson a déclaré que le défi de la “préparation des contacts” était précisément où la conversation sur cette recherche avait commencé.
“C’est pourquoi notre collaboration avec Tel Aviv est essentielle – ils connaissent la science des matériaux que nous ne connaissons pas”, a déclaré Grayson. “Nous comptons sur eux pour préparer les matériaux que nous étudions, puis nous prenons et étudions le matériel avant de nous retourner pour aider les scientifiques des matériaux Tel Aviv à mieux caractériser leurs matériaux.”
Produire de nouveaux matériaux – puis les reproduire – requise la cohérence dans de nombreuses variables différentes qui sont souvent difficiles ou même impossibles à contrôler. En exposant la question de la reproductibilité dans une grande partie de la littérature sur la détection tactile, Grayson met à l’épreuve la communauté de recherche à se tenir à une norme plus élevée avec le contrôle de qualité décrit dans l’article.
Alors que la sensibilisation à ce problème se propage parmi les chercheurs, de nouvelles publications peuvent être plus rigoureusement invoquées pour faire avancer le domaine avec de nouvelles capacités.
Plus d’informations:
Claire C. Onsager et al, passant sous la peau du capteur: l’importance de la caractérisation des contacts électriques pour les élastomères composites conducteurs, Matériaux électroniques avancés (2025). Doi: 10.1002 / aelm.202400848
Fourni par la Northwestern University
Citation: Le ponçage de l’isolation cachée se traduit par une méthode plus fiable pour mesurer la réception du toucher robotique (2025, 5 mai) récupéré le 5 mai 2025 à partir de
Ce document est soumis au droit d’auteur. Outre toute émission équitable aux fins d’études privées ou de recherche, aucune pièce ne peut être reproduite sans l’autorisation écrite. Le contenu est fourni uniquement à des fins d’information.