
Un quadrupède à l’échelle centimétrique exploite l’origami à plis incurvés
Crédit : Laboratoire chanté
Les robots marchant et rampant à l’échelle centimétrique sont recherchés à la fois pour leur capacité à explorer des environnements restreints ou encombrés et pour leurs faibles coûts de fabrication. Aujourd’hui, en s’inspirant de la construction inspirée de l’origami, des chercheurs dirigés par Cynthia Sung, professeure adjointe de la famille Gabel au département de génie mécanique et de mécanique appliquée (MEAM) de l’École d’ingénierie et de sciences appliquées, ont élaboré une approche plus simplifiée de la conception et de la fabrication de ces robots.
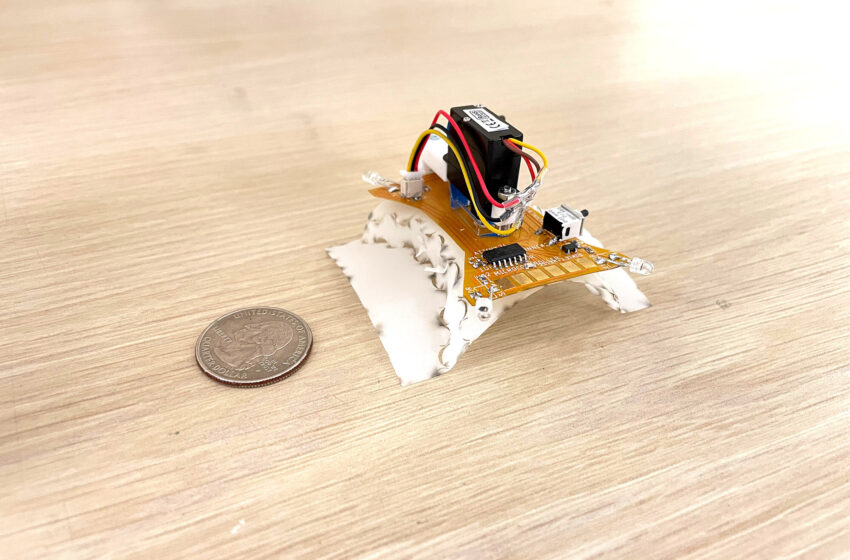
Connu sous le nom de CurveQuad, ce quadrupède à l’échelle centimétrique exploite l’origami à plis incurvés pour se plier, se déplier, ramper et se diriger, le tout à l’aide d’un seul moteur. Les plis incurvés de cette technique ont des propriétés mécaniques intéressantes par rapport aux modèles de plis droits plus couramment utilisés, car ils induisent une flexion dans une feuille pliée. L’énergie, stockée dans le pliage des plis et dans le pliage des panneaux, permet des mouvements contrôlés, réversibles et complexes en utilisant moins d’actionneurs.
“Le robot est capable de faire ces choses parce qu’il utilise des plis incurvés”, explique Sung, également membre du laboratoire GRASP (General Robotics, Automation, Sensing and Perception) de Penn. “Comme c’est simple et donc relativement bon marché, nous imaginons que des conceptions similaires pourront être réalisées à l’avenir pour un déploiement rapide d’essaims robotiques, qui pourraient être produits pour des dollars, voire des centimes par robot.”
L’article intitulé « CurveQuad : un quadrupède origami à l’échelle centimétrique qui exploite les plis incurvés pour se plier et ramper avec un seul moteur » est publié dans la revue Actes de la conférence internationale IEEE/RSJ sur les robots et systèmes intelligents. Les chercheurs ont présenté leurs travaux le 2 octobre lors de la conférence internationale IEEE/RSJ 2023 sur les robots et systèmes intelligents (IROS 2023), qui s’est tenue à Detroit, Michigan.
Le moteur unique du CurveQuad pour le pliage et le mouvement automatiques réduit la masse et le volume total du robot. La conception inspirée de l’origami simplifie également la fabrication et l’assemblage d’un robot à l’échelle centimétrique en fabriquant le robot entier, ou ses parties, à partir de quelques feuilles plates de matériau, puis en le pliant dans sa forme 3D, souvent avec des composants électroniques et des actionneurs entièrement intégrés. et calcul à bord. Ces processus de fabrication sont également évolutifs pour une production en grand volume.
CurveQuad est un nouvel ajout à l’espace de conception peu peuplé des robots marcheurs orientables à un seul actionneur. Mesurant seulement huit centimètres de long et pesant environ 11 grammes, il est relativement petit et léger pour un robot marcheur motorisé, explique Daniel Feshbach, auteur principal et doctorant au Sung Robotics Lab.
“L’implication la plus large de CurveQuad est de contribuer à la preuve que la courbure belle et douce des plis courbes peut conduire à un mouvement complexe et utile à partir de modèles de plis très simples”, dit-il. “Le motif de pliage incurvé est la caractéristique centrale qui permet au CurveQuad de se plier, de ramper et de se diriger automatiquement avec un seul moteur.”
Les chercheurs ont démontré un contrôle de base par rétroaction en dirigeant le robot vers une source de lumière à partir de différentes positions et orientations de départ. L’équipe a ensuite illustré l’agrégation d’essaims à travers quatre robots se dirigeant simultanément vers la lumière. Les résultats mettent en évidence comment l’origami à plis incurvés dans les robots auto-assemblables et déployables prend en charge des mouvements complexes comme la locomotion. Les recherches futures examineront comment de petits robots remplaçables pourraient explorer des environnements encombrés ou dangereux.
“Le CurveQuad fait partie d’une ligne de travail de notre laboratoire axée sur la simplification de la conception et de l’assemblage des robots afin qu’ils puissent être plus accessibles, personnalisables et utilisables par le grand public”, explique Sung. “Pensez, par exemple, à apporter une boîte de robots plats quelque part, à les plier et à se déplacer pour effectuer des explorations ou des détections, puis à les remettre à plat dans la boîte pour les stocker jusqu’à la prochaine utilisation. Nous travaillons actuellement sur une deuxième version. de ce robot avec une électronique entièrement intégrée afin que nous puissions démontrer cette capacité.
Les fichiers de fabrication complets et les vidéos du robot sont disponibles sur sung.seas.upenn.edu/publications/curvequad.
Plus d’information:
Daniel Feshbach et al, CurveQuad : Un quadrupède origami à l’échelle centimétrique qui exploite les plis incurvés pour se plier et ramper avec un seul moteur, Actes de la conférence internationale IEEE/RSJ sur les robots et systèmes intelligents (2023). référentiel.upenn.edu/server/ap… 76ce9def01be/content
Fourni par l’Université de Pennsylvanie
Citation: Un quadrupède à l’échelle centimétrique exploite l’origami à pli incurvé (8 novembre 2023) récupéré le 8 novembre 2023 sur
Ce document est soumis au droit d’auteur. En dehors de toute utilisation équitable à des fins d’étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.