
Un cathéter robotique changeant de forme pourrait rendre la chirurgie cardiaque plus sûre
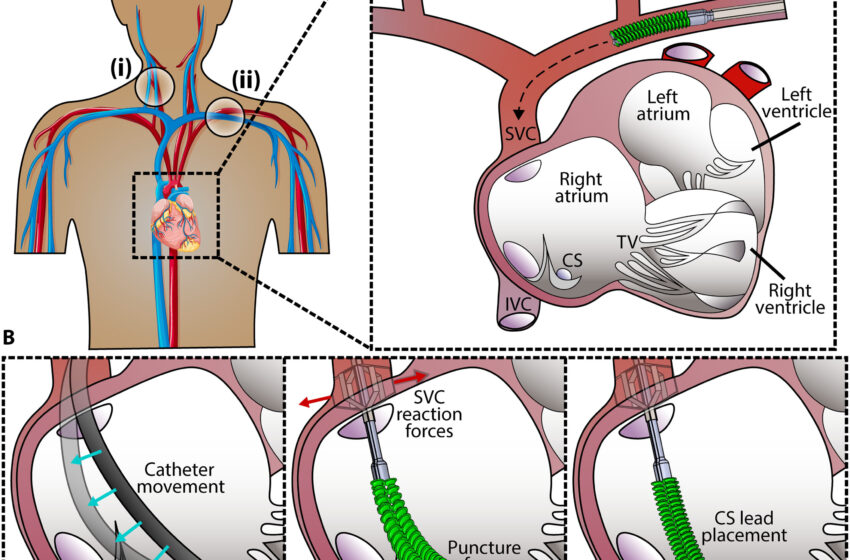
Flux de travail clinique pour les applications des appareils démontrées. (UN) Le dispositif se déplace vers l'oreillette droite à travers la veine cave supérieure via l'un des deux sites d'accès périphériques : (i) la veine jugulaire interne droite ou (ii) la veine sous-clavière gauche. (B) À gauche : Illustration des défis actuels liés aux cathéters conventionnels, où la flexibilité intrinsèque rend difficile l'application de forces et le contrôle précis de la position. Milieu : le dispositif proposé peut s'auto-stabiliser contre la veine cave supérieure pour minimiser les pertes de génération de force distale. Cette stabilisation, ainsi que la pointe robotique souple, permettent à l'utilisateur d'effectuer des procédures telles que l'implantation d'un ancrage annulaire de valve tricuspide et la mise en place d'une sonde de stimulateur cardiaque du sinus coronaire. Le robot est illustré en train de déployer une ancre dans l’anneau de la valve tricuspide. À droite : le robot est illustré guidant un fil-guide dans le sinus coronaire. Crédit: Avancées scientifiques (2023). DOI : 10.1126/sciadv.adi5559
Un cœur battant constitue un formidable domaine chirurgical, mais un nouveau cathéter robotisé pourrait un jour permettre aux chirurgiens d’opérer plus facilement dans l’environnement cardiaque.
Le dispositif, conçu par une équipe de médecins et d'ingénieurs de l'Université de Boston, possède des capacités de changement de forme qui lui permettent d'être manipulé à travers une anatomie complexe tout en conservant suffisamment de stabilité pour atteindre les objectifs chirurgicaux dans le cœur.
Dans une étude publiée dans Avancées scientifiques, les auteurs ont démontré la capacité du robot à participer à deux simulations de procédures cardiaques utilisant des tissus animaux. Les auteurs de l'étude suggèrent qu'avec des développements plus poussés, le cathéter robotisé pourrait rendre de nombreuses chirurgies cardiaques courantes beaucoup plus sûres et moins éprouvantes pour le corps.
“Les auteurs prennent soigneusement en compte la sécurité des patients dans leur conception, qui intègre de manière créative plusieurs fonctionnalités robotiques pour naviguer dans un environnement dans lequel il peut être compliqué et risqué d'opérer”, a déclaré Moria Bittmann, Ph.D., directrice du programme de robotique NIBIB.
Aujourd'hui, un nombre important d'interventions cardiaques pratiquées aux États-Unis sont des chirurgies à cœur ouvert, qui confèrent aux chirurgiens un degré élevé de contrôle mais impliquent également de longues périodes de récupération et ne constituent pas une option pour certains patients à haut risque.
Des méthodes moins invasives, dans lesquelles les chirurgiens enfilent des cathéters à travers le système vasculaire du corps pour atteindre le cœur, sont disponibles mais présentent de sérieux inconvénients. Ces instruments, bien que suffisamment petits pour passer dans les veines périphériques, sont facilement écartés par les battements du tissu cardiaque en raison de leur taille. En général, ils manquent de dextérité, ce qui rend difficile pour les chirurgiens d'atteindre le tissu cible.
Cette application a déconcerté les chercheurs travaillant sur de nouvelles solutions, car elle nécessite apparemment un instrument aux propriétés diamétralement opposées, comme être à la fois petit et grand et à la fois rigide et maniable.
Pour résoudre l'énigme, l'auteur principal Tommaso Ranzani, Ph.D., professeur de génie mécanique à l'Université de Boston, et ses collègues ont créé un système robotique qui présente les qualités spécifiques nécessaires au cours d'une procédure.
Le cathéter robotique de l'équipe est doté d'un embout flexible actionné par pression d'air, suffisamment fin pour s'insérer dans les veines mais également capable de se gonfler une fois à l'intérieur du cœur. Pour plus de stabilité, ils ont incorporé un anneau extensible qui, une fois déployé, pousserait contre les parois de la veine près de l'entrée du cœur, ancrant ainsi le cathéter en place.
Avec le mécanisme de stabilisation et une pointe gonflable, les auteurs ont estimé que l'outil serait capable d'exercer suffisamment de force pour percer les tissus cardiaques battants sans être renversé, a déclaré Ranzani. Ensuite, le cathéter pourrait effondrer à la fois son stabilisateur et son extrémité pour faciliter sa sortie.
Pour tester l'appareil dans un environnement présentant une anatomie réaliste, les chercheurs l'ont utilisé pour effectuer deux procédures cardiaques différentes dans l'oreillette droite d'un cœur de porc ex vivo, l'une des quatre chambres du cœur.
La première était une procédure courante appelée mise en place d’une sonde de stimulateur cardiaque, dans laquelle un fil de guidage pour une sonde de stimulateur cardiaque est inséré dans la paroi de l’oreillette droite.
Cinq opérateurs inexpérimentés différents ont utilisé le cathéter robotisé pour effectuer la procédure à plusieurs reprises en utilisant des cœurs extraits de porcs adultes. À titre de comparaison, un médecin expérimenté utilisant un cathéter standard a effectué la même tâche.
Les cinq opérateurs inexpérimentés ont pu mener à bien la procédure et, en moyenne, l'ont fait dans un délai similaire à celui de l'expert.
L'essai suivant de l'outil robotique était la première étape d'une procédure de réparation de la valvule tricuspide, une opération beaucoup plus difficile généralement réalisée par chirurgie à cœur ouvert. La procédure consiste normalement à fixer un anneau autour d’une valvule cardiaque qui s’ouvre et se ferme.
Comme les chercheurs n’expérimentaient pas sur des cœurs vivants battant, ils ont connecté une valvule tricuspide prélevée sur un porc à un petit moteur, provoquant le pouls de la valvule. Avec la valve battante comme cible, un chercheur a simulé l'étape initiale de la procédure consistant à ancrer l'anneau en perçant la valve à un endroit prédéterminé, en répétant le processus trois fois.
Le test a été un succès car l'instrument a été capable de maintenir le contact avec sa cible mobile et d'y appliquer une force tout au long du processus.
Ensuite, les auteurs prévoient d’introduire la technologie chez des sujets vivants et de s’attaquer à des procédures plus complexes, en rassemblant des données supplémentaires dans le but ultime de réduire le besoin de procédures chirurgicales à cœur ouvert éprouvantes.
“Alors que nous discutons de ces résultats avec des médecins travaillant dans ce domaine, nous constatons un haut niveau d'enthousiasme et entendons parler de plus en plus d'applications pour cette technologie”, a déclaré Ranzani. “Je pense que de manière générale, cette stratégie nous mène dans la bonne direction.”
Plus d'information:
Jacob Rogatinsky et al, Un robot logiciel multifonctionnel pour les interventions cardiaques, Avancées scientifiques (2023). DOI : 10.1126/sciadv.adi5559
Fourni par l'Institut national d'imagerie biomédicale et de bio-ingénierie
Citation: Un cathéter robotique changeant de forme pourrait rendre la chirurgie cardiaque plus sûre (8 décembre 2023) récupéré le 8 décembre 2023 sur
Ce document est soumis au droit d'auteur. En dehors de toute utilisation équitable à des fins d'étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.