
Des chercheurs créent « Mugatu », le premier robot bipède orientable doté d'un seul moteur
Crédit : Génie mécanique de l’Université Carnegie Mellon
Les petits robots sont des outils importants pour l’investigation et l’inspection de petits espaces. Ils peuvent placer leurs pas avec soin, ce qui leur permet de contourner les obstacles, capacités que les robots plus grands ne possèdent pas toujours. Cela peut leur permettre d’inspecter des machines ou de fouiller dans les décombres dans des scénarios de catastrophe que d’autres robots ne peuvent pas atteindre. Cependant, en raison de leurs contraintes de taille, il est difficile de construire de petits robots capables de se diriger eux-mêmes et de transporter leurs propres sources d’énergie.
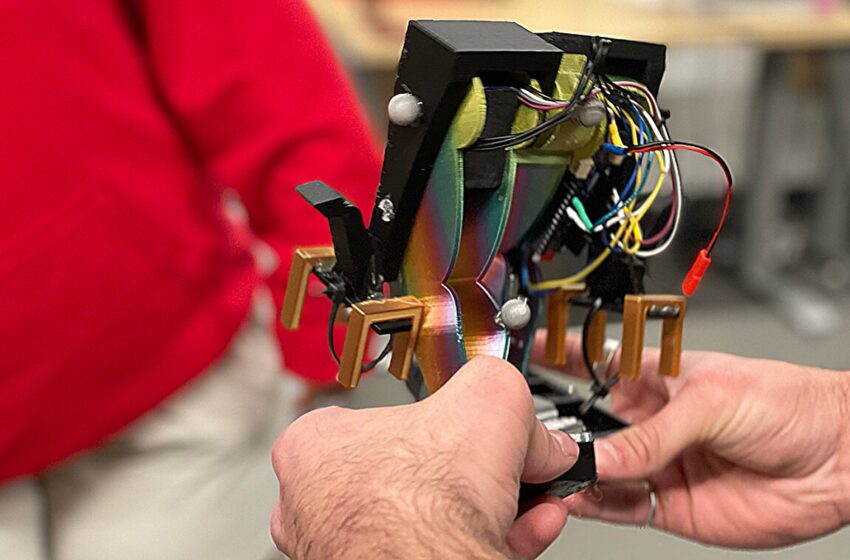
Aaron Johnson, professeur agrégé de génie mécanique, et Sarah Bergbreiter, professeur de génie mécanique, et leur équipe de chercheurs ont révolutionné le domaine avec la construction de « Mugatu », le premier robot bipède orientable contenant un seul moteur. Mugatu est également autonome et autonome ; stable en boucle ouverte dans sa démarche ; et a contrôlé la direction à gauche, à droite et en ligne droite. La conception utilise deux corps rigides et un actionneur, une conception simple de marcheur qui est toujours capable d'effectuer les mouvements complexes d'autres robots.
“La première direction du projet visait à simplifier autant que possible la façon dont les robots marchent”, explique le premier auteur James Kyle, récemment diplômé d'une maîtrise et d'un baccalauréat en génie mécanique. “Une fois que nous comprenons comment la mise à l'échelle affecte la locomotion, cela peut être extrêmement utile pour prendre quelque chose qui existe déjà et l'agrandir ou le réduire pour faire des choses comme le faire passer dans des tuyaux plus petits ou transporter plus de charge.”
Un autre membre de l'équipe, Kendall Hart, étudiante de premier cycle en génie mécanique, a travaillé sur le capteur de courant du robot, la partie du robot qui permettait à l'équipe de calculer le coût total du transport, la quantité d'énergie utilisée sur une certaine distance.
“Avant d'arriver au laboratoire, j'avais une vague compréhension de MATLAB (une plateforme de programmation et de calcul numérique), mais travailler sur ce projet m'a permis de mettre en pratique ce que j'ai appris en cours. Lorsque nous travaillions à l'implémentation du capteur de courant, il y avait Il y avait beaucoup de débogage là-bas, mais maintenant, cela m'a permis de me sentir plus à l'aise dans le débogage sans mes mentors”, a déclaré Hart.
Surnommée « Le projet LEGO », l'équipe vise à terme à réduire ces marcheurs à la taille d'un LEGO. “Cela va prendre un certain temps parce que la mécanique de tout change à mesure que vous commencez à réduire les effectifs”, explique Hart. “Mais ce qui rend le projet si spécial et si impactant dans la communauté, c'est qu'il n'a jamais été vu auparavant.” La simplification drastique de ce dispositif de marche, combinée à son degré de liberté unique, constitue une étape prometteuse (jeu de mots) vers de petits robots très efficaces.
Les collaborateurs de ce projet incluent James Kyle, Justin Y. Kim, Kendall Hart, Sarah Bergbreiter et Aaron Johnson.
Plus d'information:
James Kyle et al, Le robot marcheur le plus simple : un robot bipède avec un actionneur et deux corps rigides, arXiv (2023). DOI : 10.48550/arxiv.2308.08401
arXiv
Fourni par le génie mécanique de l'Université Carnegie Mellon
Citation: Des chercheurs créent « Mugatu », le premier robot bipède orientable doté d'un seul moteur (16 décembre 2023) récupéré le 16 décembre 2023 sur
Ce document est soumis au droit d'auteur. En dehors de toute utilisation équitable à des fins d'étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.