
Des chercheurs développent une nouvelle plateforme humanoïde pour la recherche en robotique
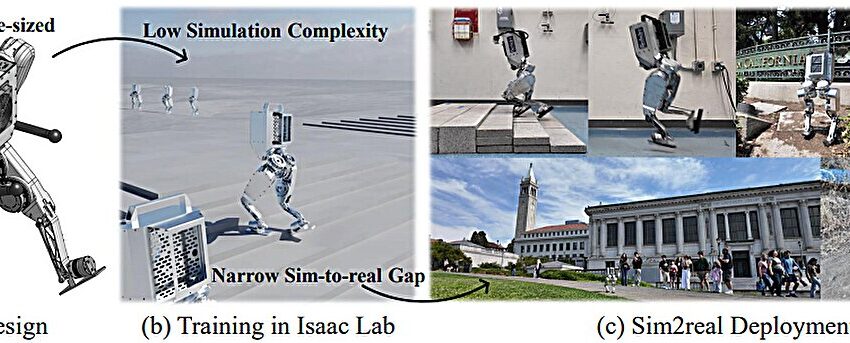
Conception, formation et déploiement de notre humanoïde personnalisé avec un contrôleur basé sur l’apprentissage. Crédit : arXiv (2024). DOI : 10.48550/arxiv.2407.21781
Les progrès dans le domaine de la robotique sont alimentés par la recherche, qui s’appuie elle-même largement sur des plateformes efficaces pour tester les algorithmes de contrôle et de navigation des robots. Si de nombreuses plateformes robotiques ont été développées au cours des dernières décennies, la plupart d’entre elles présentent des lacunes qui limitent leur utilisation dans les contextes de recherche.
Des chercheurs de l’Université de Californie (UC) à Berkeley ont récemment développé Berkeley Humanoid, une nouvelle plateforme robotique qui pourrait être utilisée pour entraîner et tester des algorithmes de contrôle de robots humanoïdes. Ce nouveau robot humanoïde, présenté dans un article publié sur le serveur de pré-impression arXivaborde et surmonte certaines des limitations des plateformes de recherche en robotique précédemment introduites.
« Après avoir mené plusieurs expériences avec des robots disponibles dans le commerce, nous avons pris conscience de certaines de leurs faiblesses », a déclaré à Tech Xplore Qiayuan Liao, co-auteur de l’étude. « Par exemple, certains composants des robots sont très coûteux, tandis que d’autres ne sont pas spécialement conçus pour le contrôle basé sur l’apprentissage ou pour la recherche, ce qui signifie souvent qu’ils sont « fragiles », faciles à casser et difficiles à entretenir et à réparer. »
L’objectif principal des travaux récents de Liao et de ses collègues était de développer des plateformes plus rentables et évolutives pour la recherche en robotique. Ces plateformes devraient être peu coûteuses, faciles à fabriquer et à expérimenter pour les chercheurs, résistantes aux pannes, faciles à transporter, nécessitant peu d’entretien et pouvant être gérées par un seul opérateur.
« La plateforme que nous avons développée, le robot humanoïde Berkeley, est dotée de hautes performances, d’actionneurs et de transmissions de bas niveau transparents, d’une plus grande fiabilité et d’un prix abordable », a expliqué Liao. « Nous y parvenons en concevant et en construisant tout à partir de zéro, y compris les composants mécaniques et électriques. »
Berkeley Humanoid est un robot compact, peu coûteux et léger qui pourrait être facilement déployé dans les laboratoires de robotique. Ses composants mécaniques personnalisés comprennent une boîte de vitesses et des actionneurs, ainsi que ses différents membres et parties du corps. Ses composants électriques, quant à eux, sont un pilote de moteur et un module d’unité de mesure inertielle (IMU).
Les chercheurs ont testé leur plateforme robotique dans une série de tests et ont démontré qu’elle pouvait s’attaquer efficacement à diverses tâches de locomotion, même lorsqu’elle était contrôlée par une politique d’apprentissage de base. Grâce à cette politique simple, le robot était capable de marcher sur différents terrains, de sauter sur une ou deux jambes et de marcher sur de longues distances sur des terrains urbains et non pavés.
« Nous avons introduit une nouvelle plateforme de recherche humanoïde à hautes performances, fiable et peu coûteuse, et nous avons démontré des tâches de locomotion étonnantes avec une politique simple basée sur l’apprentissage », a déclaré Liao. « Le Berkeley Humanoid est conçu spécifiquement pour la recherche universitaire plutôt que pour un déploiement direct dans l’industrie. Nous voulons accélérer le développement d’algorithmes et la validation expérimentale. »
Les premiers tests ont mis en évidence les promesses considérables du Berkeley Humanoid, montrant qu’il peut supporter la marche dynamique avec différents styles de locomotion tout en conservant sa stabilité sur différents types de terrain. La plateforme pourrait bientôt être utilisée à la fois à Berkeley et dans d’autres laboratoires de recherche en robotique pour former et tester de nouveaux algorithmes de contrôle et de navigation des robots.
« Nous espérons maintenant ajouter des bras à notre robot pour lui permettre d’effectuer des recherches liées à la manipulation », a ajouté Liao. « Dans le cadre de nos prochaines études, nous espérons également ajouter des capacités de perception à l’aide de la caméra pour permettre des performances encore meilleures. »
Plus d’informations :
Qiayuan Liao et al, Berkeley Humanoid : une plateforme de recherche pour le contrôle basé sur l’apprentissage, arXiv (2024). DOI : 10.48550/arxiv.2407.21781
arXiv
© 2024 Réseau Science X
Citation: Des chercheurs développent une nouvelle plateforme humanoïde pour la recherche en robotique (2024, 28 août) récupéré le 28 août 2024 à partir de
Ce document est soumis au droit d’auteur. En dehors de toute utilisation équitable à des fins d’étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni à titre d’information uniquement.