
Une patte de détection qui pourrait améliorer la capacité des robots à pattes à se déplacer sur différents terrains
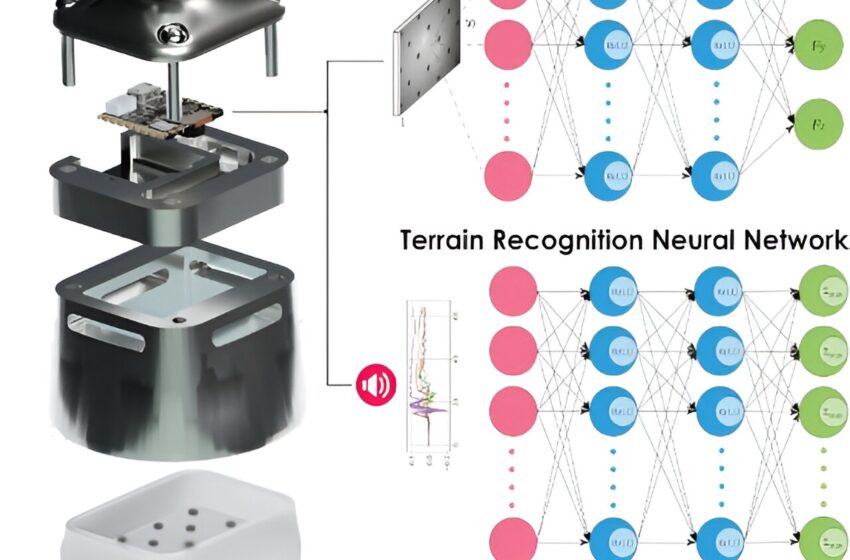
L’image de gauche montre la conception CAO dans une vue éclatée avec la patte en silicone avec le motif en bas, le boîtier en aluminium au centre et la carte avec caméra et microphone. L’image de droite illustre les réseaux de neurones utilisés pour estimer la force en fonction du motif de déformation et le réseau de neurones utilisé pour classer le terrain. Crédit : Vangen et al.
Les robots à pattes qui reproduisent artificiellement la structure du corps et les mouvements des animaux pourraient accomplir efficacement des missions dans un large éventail d’environnements, y compris divers environnements naturels extérieurs. Mais pour ce faire, ces robots doivent être capables de marcher sur différents terrains, comme la terre, le sable, l’herbe, etc., sans perdre l’équilibre, sans rester coincés ou tomber.
Des chercheurs de l’Université norvégienne des sciences et technologies (NTNU) et de l’Institut indien de technologie de Bombay ont récemment développé une nouvelle patte artificielle dotée de capacités de détection qui pourraient contribuer à améliorer la capacité des robots à pattes à se déplacer sur divers terrains. Cette patte « sensorielle », présentée dans un article posté sur le serveur de préimpression arXivpeut reconnaître différents terrains et leurs propriétés en estimant la force appliquée à sa surface depuis le sol situé en dessous.
“Nos activités de recherche passées pour le DARPA Subterranean Challenge, qui a finalement été remporté par l’équipe CERBERUS dirigée par le professeur Kostas Alexis, ont indiqué l’importance d’une réponse robuste aux terrains difficiles”, Tejal Barnwal, professeur Alexis et Jørgen Anker Olsen, auteurs de l’étude. papier, a déclaré à Tech Xplore.
“Notre équipe a participé au concours avec le robot à pattes ANYmal, une plateforme fournie par nos partenaires de l’ETH Zurich, et cela a été la clé de notre succès. Comprenant les limites de l’état de l’art, nous avons conclu qu’améliorer la perception d’un robot à pattes grâce à des pattes sensorielles, cela pourrait rendre le contrôle de la locomotion encore plus fiable et adaptatif. »
Des études antérieures ont régulièrement fait état des difficultés que peuvent rencontrer les robots à pattes lorsqu’ils se déplacent sur des terrains inégaux et complexes. Par exemple, ils ont découvert que les terrains difficiles peuvent restreindre les mouvements des robots à pattes et créer des occlusions, empêchant les robots de détecter efficacement leur environnement.
Ces dernières années, roboticiens et informaticiens ont ainsi tenté de développer des méthodes informatiques capables de reconnaître différents terrains et de moduler les mouvements des robots à pattes en conséquence, afin d’assurer leur locomotion optimale. Pourtant, de nombreuses approches proposées jusqu’à présent s’appuient sur des capteurs déjà intégrés aux robots, tels que les capteurs et caméras LiDAR, qui n’offrent qu’une vue limitée de l’environnement et du terrain sur lequel les robots marchent.
“L’intégration des informations visuelles, tactiles et sonores permet aux humains et aux animaux de s’adapter rapidement lorsqu’ils marchent ou courent sur divers terrains”, ont déclaré Barnwal, Olsen et Alexis. “Cette approche multisensorielle améliore la conscience spatiale, améliore l’équilibre et facilite la prise de décision rapide pour une navigation sûre dans des environnements variés. De même, fournir aux quadrupèdes une reconnaissance sonore du terrain et des informations sur la pression lors de l’effort du pied en temps réel peut les aider à maintenir l’équilibre. et peut les aider à adapter efficacement leurs stratégies de contrôle et de navigation dans diverses situations de terrain. »
Barnwal, Olsen, Alexis et leur collègue Alexander Vangen ont entrepris de développer un nouveau système capable de recueillir des informations plus détaillées sur le terrain sur lequel les robots se déplacent en temps réel. Ils ont finalement créé une patte ou un pied artificiel, baptisé TRACEPaw, qui peut être intégré au bas d’une jambe robotique.
“Doté d’un effecteur hémisphérique à base de silicone, TRACEPaw utilise la déformation du silicium, une micro-caméra intégrée et un microphone pour l’estimation en temps réel des vecteurs de force 3D et la reconnaissance de divers types de terrain, notamment le gravier, la neige, le sable et plus encore. “, ont expliqué les chercheurs.
“L’effecteur de la patte répond aux forces de contact en se déformant, tandis qu’une micro-caméra intégrée capture des images de la surface intérieure déformée à l’intérieur de la chaussure. Simultanément, un microphone capture les signaux audio lors de l’interaction entre la patte et le terrain.”
Le système en forme de patte créé par Barnwal, Olsen, Alexis et Vangen collecte une variété de données sensorielles de l’environnement, en particulier du terrain situé en dessous. Ensuite, ces données sont analysées par un modèle de vision par ordinateur entraîné par apprentissage supervisé, qui peut faire des prédictions sur un terrain et estimer ce que l’on appelle la force de contact, basée sur la déformation de sa surface de silicium et le bruit produit par le sol.
“Le système utilise des modèles d’apprentissage supervisé simples mais efficaces pour l’estimation de la force 3D basée sur la vision sur la déformation du silicone et la classification audio des sols, permettant une détection, un calcul et une inférence en temps réel”, ont déclaré les chercheurs.
Un autre avantage du système de détection créé par cette équipe de recherche est qu’il a été créé à l’aide de composants électroniques disponibles dans le commerce. Cela signifie qu’il pourrait être fabriqué à grande échelle facilement et à moindre coût.
“Notre patte sensorielle a été fabriquée à l’aide d’électronique disponible dans le commerce et de composants standard”, ont déclaré Barnwal, Olsen et Alexis. “Cela peut contribuer à l’accessibilité, à l’évolutivité et à la facilité de fabrication en interne du système, ce qui pourrait faciliter son adoption et sa réplication à grande échelle.”
Les chercheurs ont évalué les performances de leur système dans une série d’expériences menées en laboratoire. Leurs premières découvertes étaient très prometteuses, suggérant que TRACEPaw peut améliorer considérablement la mobilité et l’utilité des robots à pattes, leur permettant de reconnaître et de s’adapter à des terrains spécifiques.
“Notre étude montre également que l’informatique de pointe, à l’intérieur de la patte, avec des modèles d’apprentissage supervisés peut aider à une prise de décision rapide et fiable, améliorant l’adaptabilité et la réactivité du robot, cruciales pour naviguer dans des environnements dynamiques et prévenir des incidents tels que glisser ou trébucher dans des environnements imprévisibles. terrains”, ont déclaré les chercheurs.
À l’avenir, la patte artificielle créée par Barnwal, Olsen, Alexis et Vangen pourrait faciliter le déploiement de robots à pattes dans des contextes réels, par exemple lors de missions de recherche et de sauvetage ou d’exploration. Pendant ce temps, l’équipe prévoit de continuer à améliorer son système en entraînant son algorithme sous-jacent sur davantage de données, car cela pourrait affiner davantage ses capacités d’estimation de force et de classification des sols.
“Dans nos futurs travaux, nous viserons à améliorer la compréhension environnementale du système en incorporant les données de l’IMU embarquée, offrant ainsi un aperçu de la pente du terrain et de la direction des forces dans le cadre terrestre”, ont ajouté les chercheurs.
“Nous prévoyons également d’évaluer ses performances sur des terrains multi-classés plus complexes. À terme, l’intégration potentielle de TRACEPaw avec un robot physique à pattes permettra une évaluation complète des performances du système intégré dans des scénarios réels.”
Plus d’information:
Aleksander Vangen et al, Reconnaissance du terrain et estimation de la force de contact grâce à une patte sensorielle pour les robots à pattes, arXiv (2023). DOI : 10.48550/arxiv.2311.03855
arXiv
© 2023 Réseau Science X
Citation: Une patte de détection qui pourrait améliorer la capacité des robots à pattes à se déplacer sur différents terrains (27 novembre 2023) récupéré le 27 novembre 2023 sur
Ce document est soumis au droit d’auteur. En dehors de toute utilisation équitable à des fins d’étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.