Robots et IA en Ukraine relancent le débat international sur les armes autonomes
Robots au sol et IA en Ukraine : vers une nouvelle ère de la guerre sans pilote En Ukraine, l’utilisation


Robots au sol et IA en Ukraine : vers une nouvelle ère de la guerre sans pilote En Ukraine, l’utilisation

Airtificial Group renforce sa présence à l’international avec la signature de trois nouveaux contrats industriels, dont un au Maroc. Sa

Un gros plan du ballon gonflable sous le bras gonflable du robot portable. Crédit: Université Harvard Ayant vécu avec un

Les robots domestiques, tels que les aspirateurs de robots, passent la majeure partie de leur journée au ralenti – les

Un robot participe au Humanoid Robot Half Marathon à Pékin le 19 avril 2025. Étape par mécanique, des dizaines de

Stellantis continue d’investir massivement dans le Maroc. Après un investissement de 300 millions d’euros il y a un peu plus
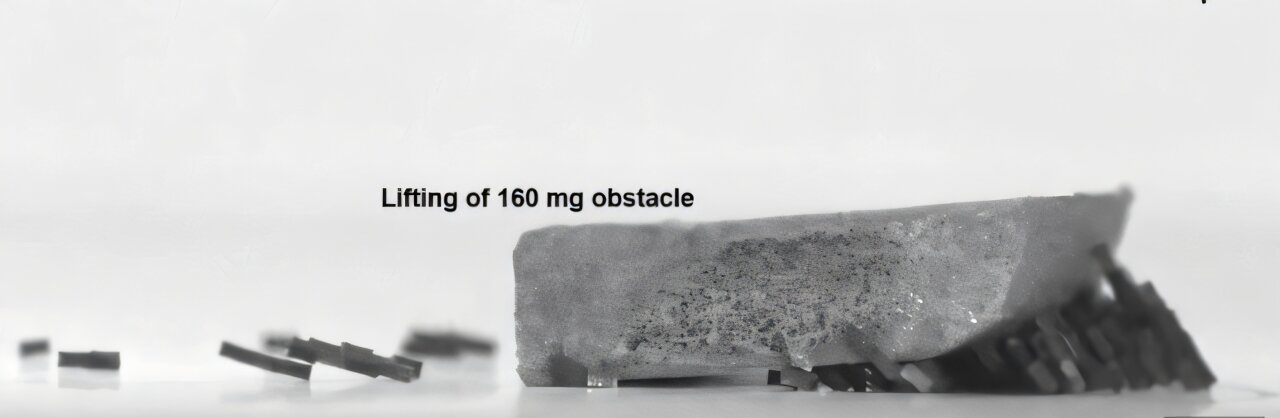
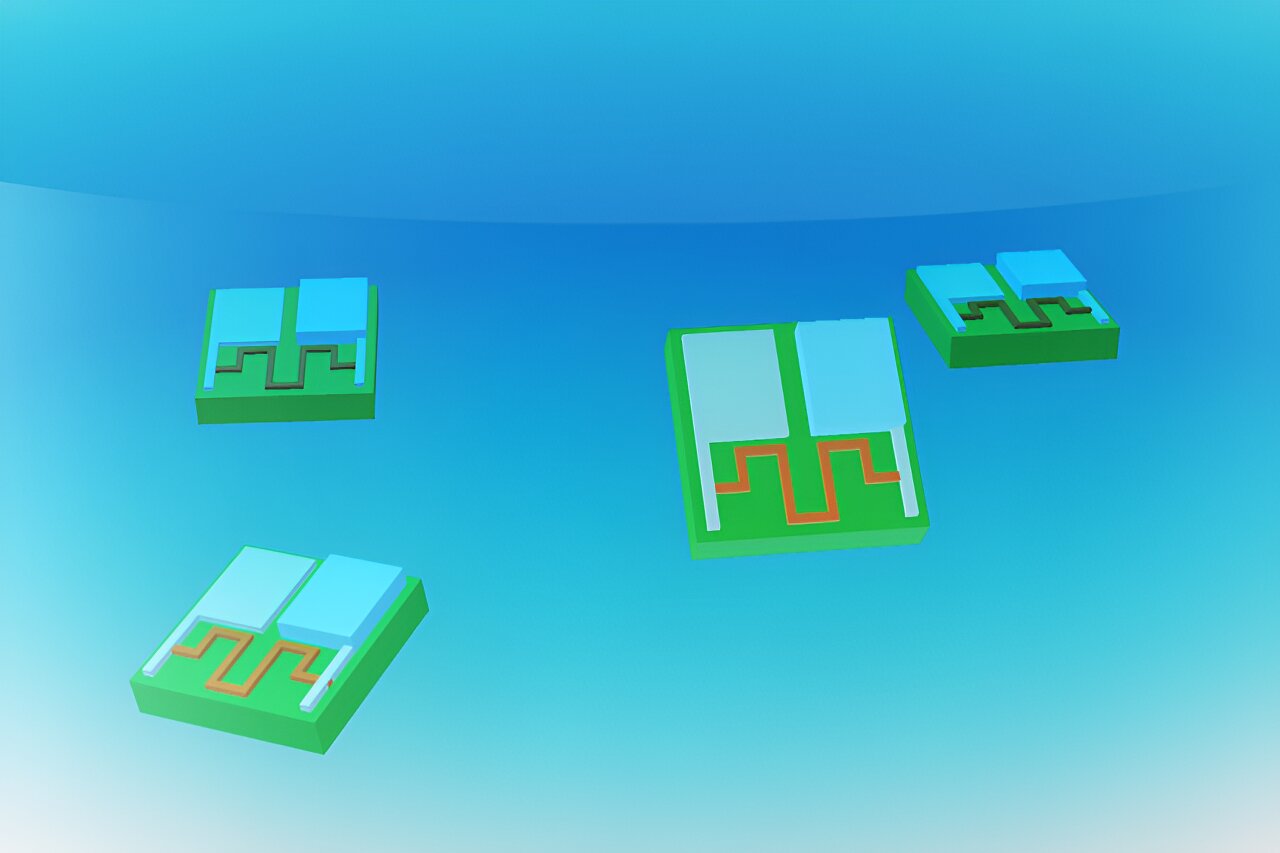
Robots soulevant et objet. Crédit : Device/Yang et Won et al. Des scientifiques sud-coréens ont développé des essaims de minuscules
Un chien robotique ramassant une balle de tennis sur une pelouse. Crédit : Yuchen Song/UC San Diego. Les robots quadrupèdes

Crédit : Université Cornell Construire un robot demande du temps, des compétences techniques, les bons matériaux et parfois, un peu
La pile zinc-air mesure 0,1 millimètre de long et 0,02 millimètre d’épaisseur. Crédit : Massachusetts Institute of Technology Une minuscule