Des chercheurs créent une nouvelle méthode pour orchestrer une collaboration réussie entre robots
Crédit : Université du Massachusetts à Amherst De nouvelles recherches menées par l’Université du Massachusetts à Amherst montrent que la


Crédit : Université du Massachusetts à Amherst De nouvelles recherches menées par l’Université du Massachusetts à Amherst montrent que la

Un nouvel algorithme développé par des chercheurs du MIT CSAIL aide les robots à s’entraîner seuls à certaines compétences. Dans

Présentation du système RialTo. 1) Transférez la scène du monde réel vers le simulateur via une API facile à utiliser
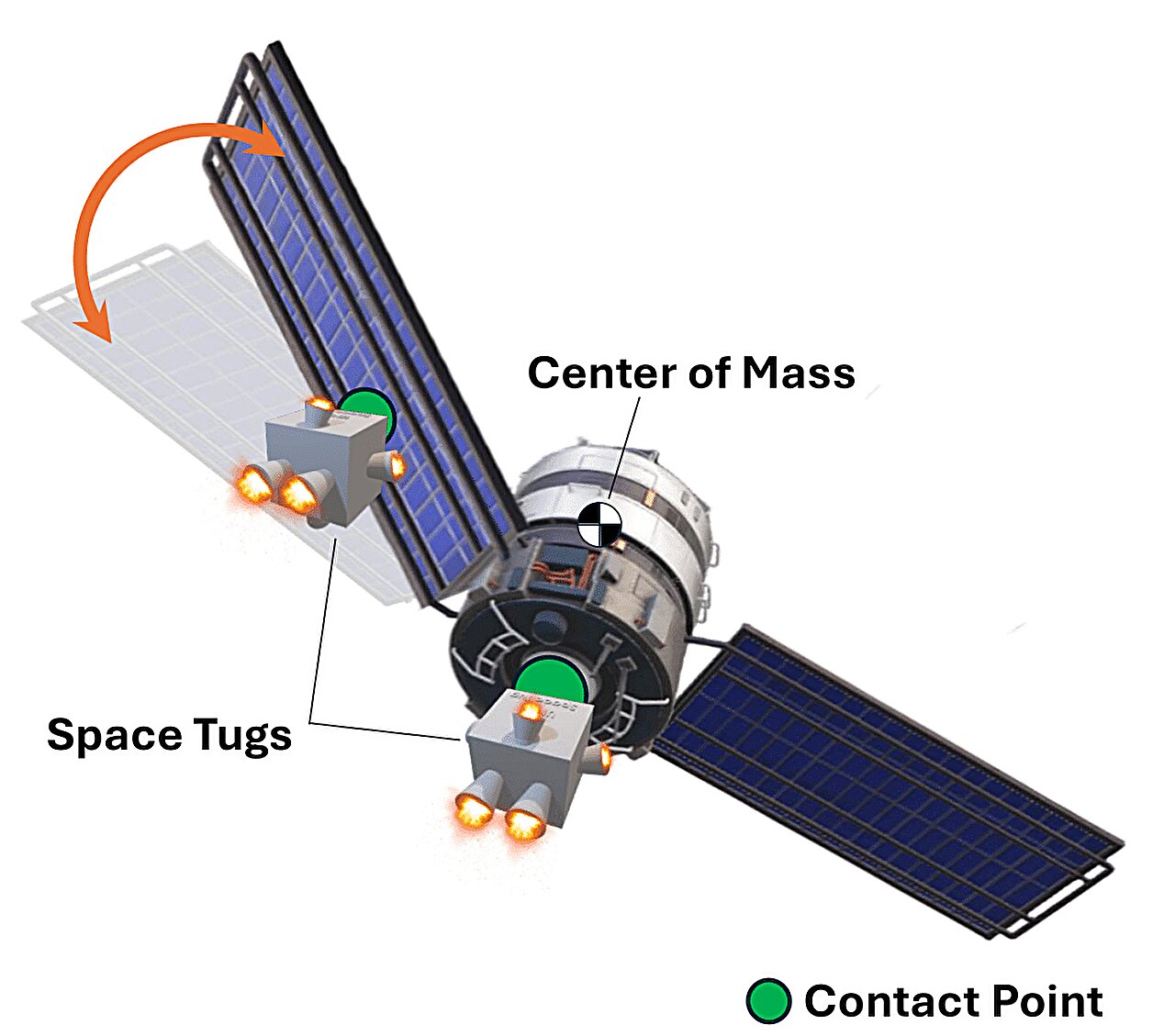
Deux remorqueurs spatiaux démolissent ensemble un satellite non rigide dans un environnement spatial. Crédit : Gao, Danielson & Fierro. Plus

Le microrobot à battements d’ailes prend son envol grâce à des ailes passives déployables et rétractables. Crédit : Hoang-Vu Phan
Grâce aux « jumeaux numériques », RialTo, développé par les chercheurs du MIT Marcel Torne Villasevil (à gauche) et Pulkit

Diagramme expliquant ce qu’implique la compréhension du vocabulaire ouvert. Crédit : Meng et al, arXiv (2024). DOI : 10.48550/arxiv.2407.13175 Pour être

Vues du dispositif expérimental et des paramètres. Crédit : Interface du Journal de la Royal Society (2024). DOI : 10.1098/rsif.2024.0141 Les
SimPLE peut transformer des agencements d’objets non structurés (c’est-à-dire disposés de manière arbitraire sur la table) en agencements structurés où

Notre TieBot proposé effectue une tâche de nouage de cravate. Nous utilisons la simulation de tissu pour récupérer le mouvement