Des chercheurs créent une stratégie de navigation autonome inspirée des insectes pour des robots minuscules et légers
Un petit drone « CrazyFlie » de 56 grammes capable de revenir à un point de départ grâce à une


Un petit drone « CrazyFlie » de 56 grammes capable de revenir à un point de départ grâce à une
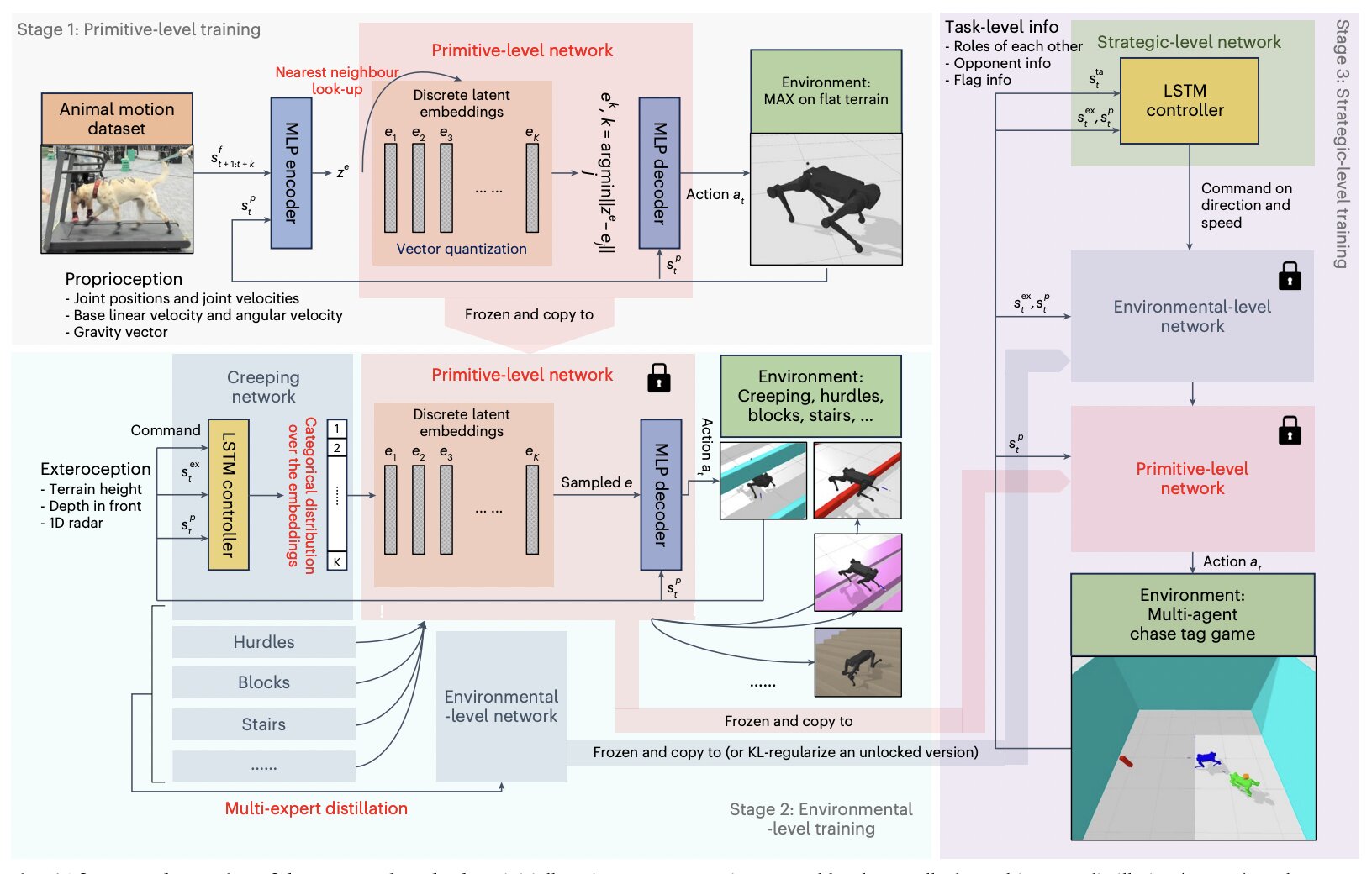
Un aperçu du cadre de la méthode proposée. Nous entraînons initialement un PMC à imiter les mouvements des animaux en
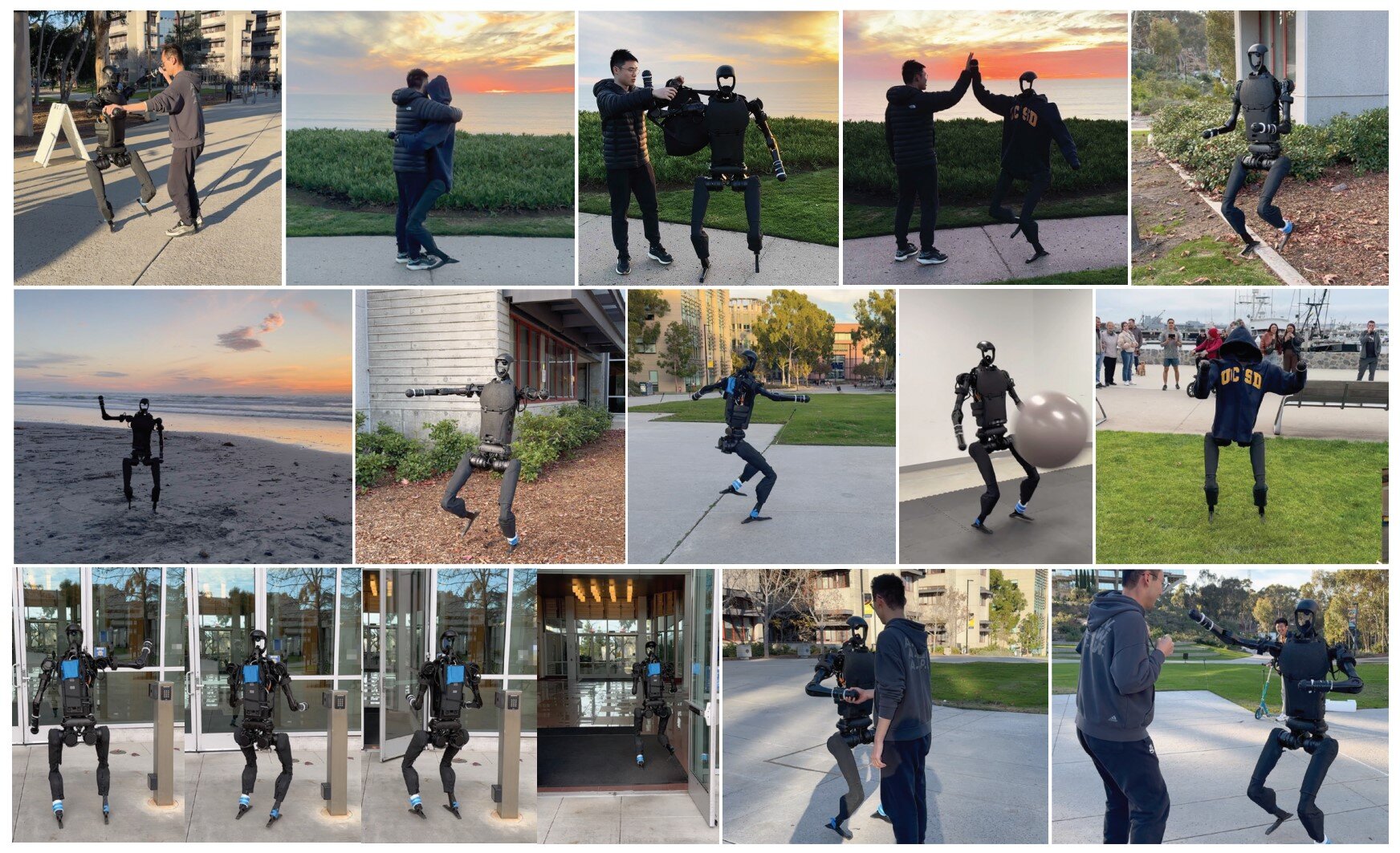
Notre robot démontre des mouvements corporels divers et expressifs dans différents scénarios. Rangée supérieure : Le robot danse, serre dans

Un robot rampant et un muscle artificiel réunis. Crédit : Ryan Truby/Taekyoung Kim/Northwestern University Des ingénieurs de l’Université Northwestern ont
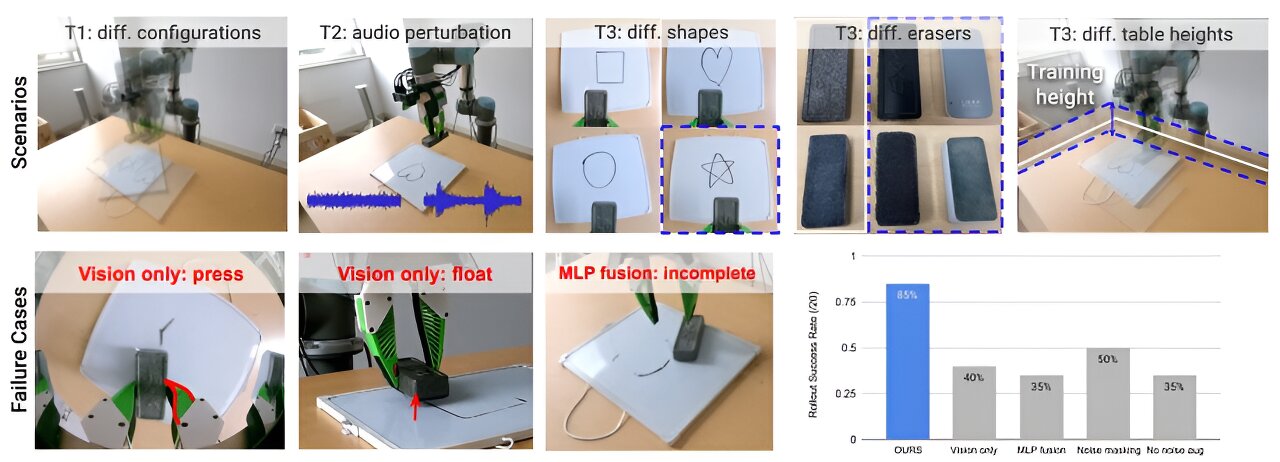
Évaluation de l’effacement. En haut : Différents scénarios de test. En bas : Cas d’échec typiques et taux de réussite

Crédit : IIT-Istituto Italiano di Tecnologia Des chercheurs de l’Istituto Italiano di Tecnologia (IIT-Institut italien de technologie) ont démontré que, dans

Le tissu cutané modifié et la manière dont il adhère à la structure complexe sous-jacente des caractéristiques du robot ont
Le véritable robot Hexapode utilisé pour valider la méthode de contrôle de l’équipe. Crédit: Héliyon (2024). DOI : 10.1016/j.heliyon.2024.e31847 Les

Le robot ClearPath Jackal naviguant dans un environnement extérieur à l’UC San Diego. Crédit : Long et al. Pour mener à
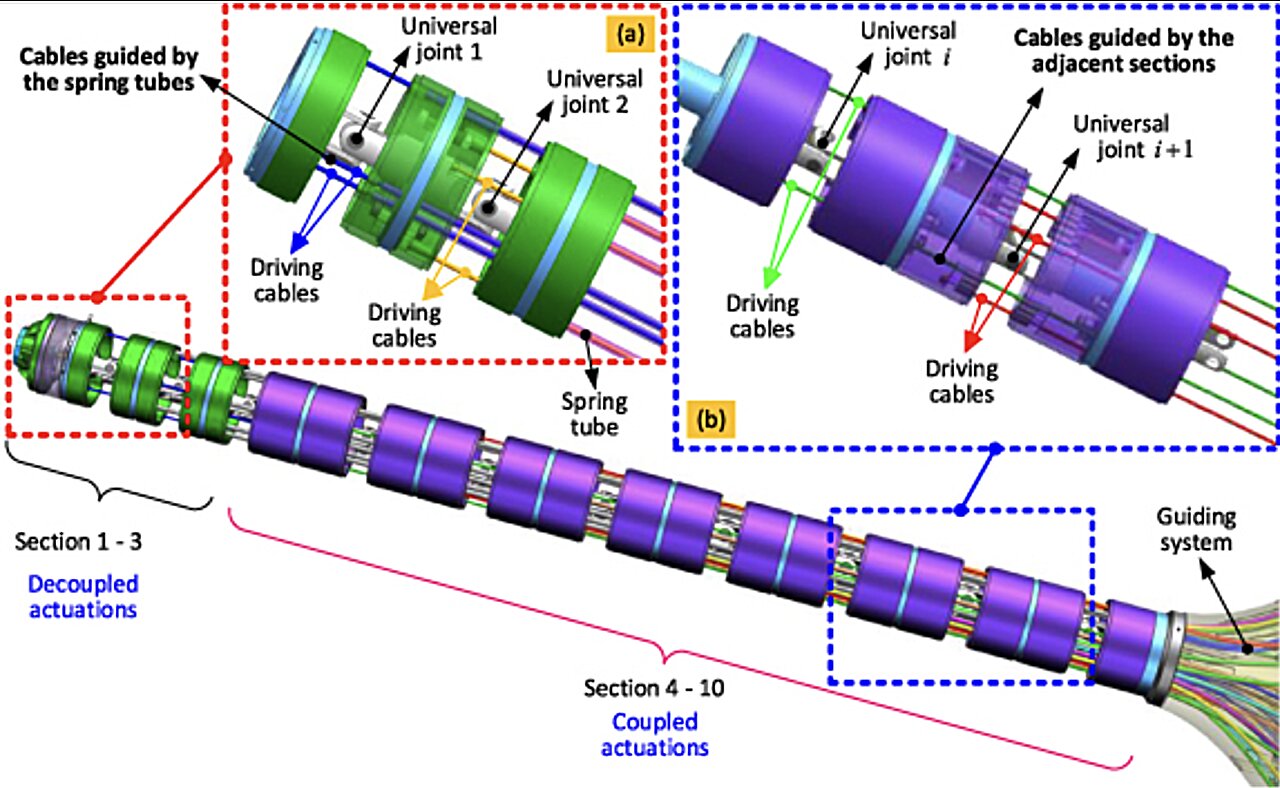
Schéma du robot serpent de 20 DoF montrant la structure du fonctionnement « macro-micro » : (a) montre les trois sections de pointe