
Une nouvelle stratégie pour réguler la rigidité des robots inspirés des serpents
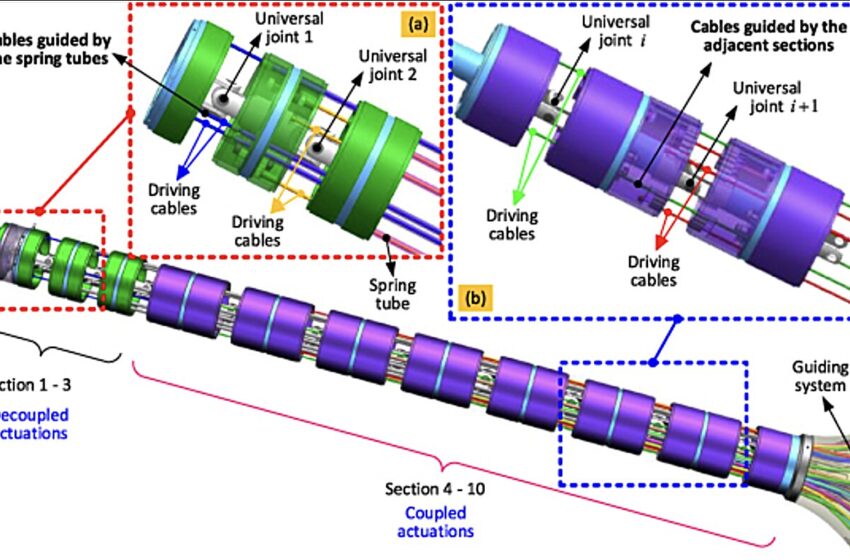
Schéma du robot serpent de 20 DoF montrant la structure du fonctionnement « macro-micro » : (a) montre les trois sections de pointe avec actionnement découplé ; (b) montre les sept sections de base avec actionnement couplé. Crédit : Ma et al
Les systèmes robotiques inspirés de la nature peuvent aider à résoudre efficacement un large éventail de problèmes, allant de la navigation dans des environnements complexes à l’accomplissement fluide de missions en équipe. Ces dernières années, les roboticiens ont créé un nombre croissant de systèmes bio-inspirés conçus pour reproduire la structure corporelle et les mouvements de divers animaux, notamment des serpents.
Les robots ressemblant à des serpents pourraient présenter divers avantages par rapport à d’autres systèmes dotés de structures corporelles plus conventionnelles. Grâce à leur corps flexible et à leurs mouvements de glissement, ils pourraient atteindre des zones petites et confinées qui seraient autrement difficiles d'accès, par exemple en se déplaçant à l'intérieur de canalisations, de mines et dans d'autres environnements difficiles.
Malgré leur potentiel, les robots serpents n’ont pas encore été déployés avec succès à grande échelle. Cela est dû en partie aux difficultés rencontrées lorsqu'on tente de moduler efficacement la rigidité de ces systèmes, permettant ainsi d'effectuer les mouvements souhaités et d'atteindre les positions cibles avec une grande précision.
Des chercheurs de l’Université de Lancaster, de l’Institut de technologie de Pékin et de l’Université de technologie de Chine du Nord ont récemment entrepris de développer une nouvelle stratégie de conception qui pourrait aider à mieux réguler la rigidité des robots serpents. Leur méthode proposée, décrite dans la revue Bioinspiration & Biomimétiquea été appliqué au développement d'un bras robotique en forme de serpent avec 20 degrés de liberté (DoF).
“Les robots Snake ont été largement utilisés dans des environnements difficiles, tels que des espaces confinés”, ont écrit Nan Ma, Haqin Zhou et leurs collègues dans leur article. “Cependant, la plupart des robots serpents existants avec de grands rapports longueur/diamètre ont une faible rigidité, ce qui limite leur précision et leur utilité. Pour remédier à cela, une nouvelle structure 'macro-micro' aidée par une nouvelle stratégie globale de régulation de la rigidité est proposée dans cet article. “.
La structure macro-micro conçue par cette équipe de recherche peut améliorer la précision de position des robots ressemblant à des serpents lorsqu'ils naviguent dans des espaces confinés, à la fois au-dessus et sous terre. Cette structure est accompagnée d'une stratégie globale nouvellement développée pour réguler la rigidité du robot, ainsi que d'un modèle kinétostatique conçu pour estimer les erreurs.
“Le frottement interne, la variation de la rigidité du câble en fonction de la tension et leurs effets sur la rigidité structurelle du bras de serpent sous différentes configurations ont été incorporés au modèle pour augmenter la précision de la modélisation”, ont écrit Ma, Zhou et leurs collègues. “Enfin, les modèles proposés ont été validés expérimentalement sur un prototype physique et un système de contrôle (erreur : 4,3 % et 2,5 % pour les configurations droites et courbes, respectivement).”
Ma, Zhou et leurs collègues ont utilisé la conception proposée pour développer un système prototype, qu'ils ont ensuite évalué lors d'une série de tests initiaux. Leurs résultats étaient très prometteurs, car leur stratégie leur a permis d'ajuster la tension des câbles entraînant les mouvements du bras en forme de serpent de 183,4 % en moyenne.
À l’avenir, cette étude récente pourrait éclairer le développement de systèmes robotiques inspirés du serpent plus performants, qui peuvent être modulés avec une plus grande précision et ainsi mieux accomplir des missions dans des environnements complexes et très confinés. Ces robots pourraient s’avérer incroyablement précieux pour assister les agents humains lors des opérations de recherche et de sauvetage, pour surveiller les environnements souterrains et pour d’innombrables autres applications avancées du monde réel.
Plus d'information:
Nan Ma et al, Régulation complète de la rigidité sur un robot serpent multi-sections en tenant compte des effets de mouvement et de friction des parasites, Bioinspiration & Biomimétique (2023). DOI : 10.1088/1748-3190/ad0ffc
© 2023 Réseau Science X
Citation: Une nouvelle stratégie pour réguler la rigidité des robots inspirés des serpents (27 décembre 2023) récupéré le 27 décembre 2023 sur
Ce document est soumis au droit d'auteur. En dehors de toute utilisation équitable à des fins d'étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.