
Une méthode adaptative pour déculer les satellites non rigides à l’aide de robots
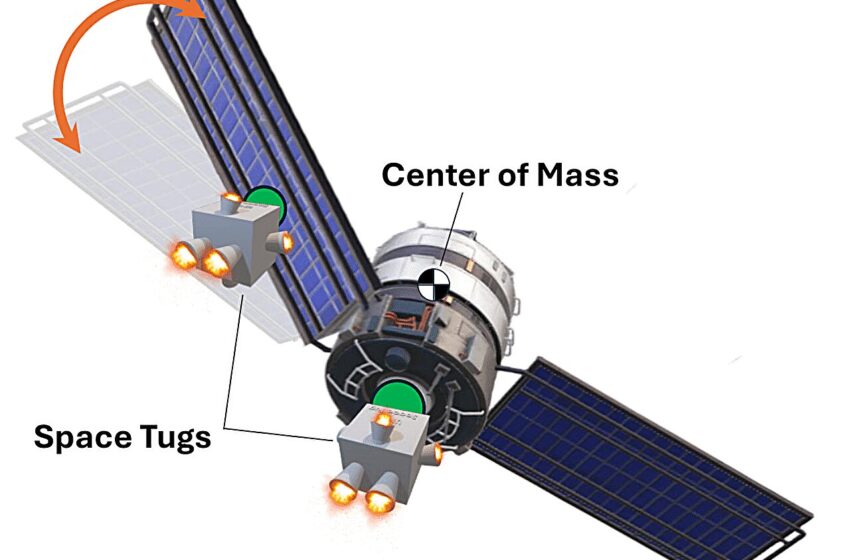
Deux remorqueurs spatiaux démolissent ensemble un satellite non rigide dans un environnement spatial. Crédit : Gao, Danielson & Fierro.
Plus de 8 000 satellites artificiels gravitent aujourd’hui en orbite autour de la Terre, dont beaucoup ont été lancés dans l’espace il y a plusieurs décennies. Réparer et maintenir en bon état de fonctionnement ces satellites n’est pas toujours chose aisée et nécessite souvent des interventions soigneusement planifiées et ciblées.
Une opération courante de maintenance des satellites est connue sous le nom de « déroutage ». Ce processus consiste à stabiliser et à manipuler l’orientation des satellites qui commencent à tourner de manière incontrôlable (c’est-à-dire à basculer) dans l’espace.
Des chercheurs de l’Université du Nouveau-Mexique (UNM) ont récemment présenté une nouvelle méthode adaptative pour déculer les satellites non rigides dont la dynamique de mouvement est inconnue. Leur approche proposée a été décrite dans un article publié sur le site arXiv serveur de préimpression et devrait être présenté à la conférence IEEE sur la décision et le contrôle (CDC 2024) qui se tiendra du 16 au 19 décembre à Milan, en Italie.
« Notre article est basé sur notre financement actuel de recherche spatiale, le SURI », a déclaré à Tech Xplore Longsen Gao, premier auteur de l’article, désormais étudiant en troisième année de doctorat au laboratoire AgMan en tant que l’un des principaux chercheurs de ce projet.
« À l’UNM, nous cherchons à exploiter nos systèmes multi-robots (c’est-à-dire les remorqueurs spatiaux, les systèmes robotiques multi-bras d’entretien spatial, etc.), qui intègrent de nouvelles conceptions de contrôleur, pour réaliser des tâches complexes d’entretien et de réparation de manipulation visant à réparer les systèmes spatiaux défectueux, tels que les satellites, les panneaux solaires, les pièces rigides ou non rigides des systèmes spatiaux, etc. »
 et le Link-2 (partie bleue) dans un environnement de simulation en apesanteur. Nous importons le système de charnière hybride du réel et intégrons les propriétés de frottement, de ressort et d'amortisseur sur le rotor. Crédit : Gao, Danielson & Fierro")
Deux remorqueurs spatiaux fixés à différents endroits d’un satellite pour appliquer des clés sur le Link-1 (partie jaune) et le Link-2 (partie bleue) dans un environnement de simulation en apesanteur. Nous importons le système de charnière hybride du réel et intégrons les propriétés de frottement, de ressort et d’amortisseur sur le rotor. Crédit : Gao, Danielson & Fierro
L’objectif principal de l’étude récente de Gao et de ses collègues était de mettre au point une méthode efficace pour déculer les satellites non rigides. Une telle méthode pourrait avoir des ramifications importantes, car le déculage est une cause majeure de dysfonctionnement des satellites, et la plupart des solutions de déculage existantes ne s’appliquent qu’aux satellites rigides.
« Aucune autre recherche antérieure n’a examiné le problème de la rigidité des satellites non rigides », a déclaré Gao. « Presque tous les efforts de réduction de la rigidité considèrent les satellites comme des corps rigides, simplifiant leur structure et ignorant les problèmes potentiels qui pourraient survenir en raison des variations de leur rigidité.
« Nos recherches vont plus loin, en s’attaquant au problème de décrochage des satellites non rigides à l’aide de deux remorqueurs spatiaux, l’un tenant la base du satellite et l’autre tenant le panneau solaire défectueux, pour transférer l’ensemble du module satellite dans une chaîne à deux maillons en tant que système non rigide, cessant le mouvement inconnu du satellite. »
La méthode de détomblage introduite par cette équipe de chercheurs est adaptative, dans le sens où elle peut être appliquée à divers objets non rigides, quelles que soient leurs propriétés. En d’autres termes, l’approche ne nécessite pas de connaissance préalable d’un satellite (par exemple, sa masse, son inertie, son centre de masse, sa forme, sa rigidité, etc.) pour réussir à le détombler.
« Plus important encore, notre méthode garantit que le système multi-agent peut faire basculer le satellite non rigide sans connaître sa position de préhension par rapport au centre de masse du satellite, ce qui constitue également une avancée par rapport aux méthodes de contrôle adaptatif SOTA », a expliqué Gao.
L’approche mise en place par les chercheurs consiste à utiliser deux systèmes robotiques qui se fixent au satellite à différents endroits. Ces systèmes appliquent la force et le couple nécessaires pour stabiliser le satellite, stoppant son mouvement et le ramenant ainsi à son bon fonctionnement.
« Notre méthode de déculbutage adaptatif s’attaque au problème le plus difficile de la recherche sur le déculbutage SOTA, à savoir que la plupart des approches existantes ignorent la structure non rigide du satellite pendant le processus de déculbutage », a déclaré Gao. « Nous considérons qu’il s’agit d’un problème grave et courant qui peut survenir sur les satellites lorsqu’ils fonctionnent dans l’espace. »
La nouvelle approche de déculbutage introduite par Gao et ses collègues pourrait bientôt être améliorée et testée plus avant dans des expériences réelles, notamment dans des environnements en apesanteur. Notamment, bien que la méthode ait été conçue pour le déculbutage de satellites non rigides, elle pourrait également être appliquée à d’autres objets dotés de structures corporelles non rigides, ce qui pourrait potentiellement être utilisé pour s’attaquer à d’autres tâches de maintenance et de réparation.
« Dans nos prochaines études axées sur l’entretien et la réparation de l’espace, nous continuerons d’explorer comment tirer parti des systèmes robotiques pour mettre en œuvre un travail de manipulation adroit lors des tâches de réparation et d’entretien », a ajouté Gao.
« Nous prévoyons de combiner des méthodes basées sur l’apprentissage (par exemple, les réseaux neuronaux, l’apprentissage automatique et l’apprentissage profond) avec la conception de notre système de contrôle pour améliorer les performances de notre algorithme de contrôle. Nous nous concentrons également sur la conception d’algorithmes MPC adaptatifs robustes qui pourraient être appliqués aux tâches d’entretien et de réparation spatiales, ce qui pourrait améliorer l’efficacité et la robustesse de notre méthode. »
Plus d’information:
Longsen Gao et al., Robot adaptatif pour déculbuter un satellite non rigide, arXiv (2024). DOI : 10.48550/arxiv.2407.17617
arXiv
© 2024 Réseau Science X
Citation:Une méthode adaptative pour déculer les satellites non rigides à l’aide de robots (2024, 7 août) récupéré le 7 août 2024 à partir de
Ce document est soumis au droit d’auteur. En dehors de toute utilisation équitable à des fins d’étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni à titre d’information uniquement.