
Une équipe de recherche développe une nouvelle technologie pour le contrôle robotique des jambes prothétiques
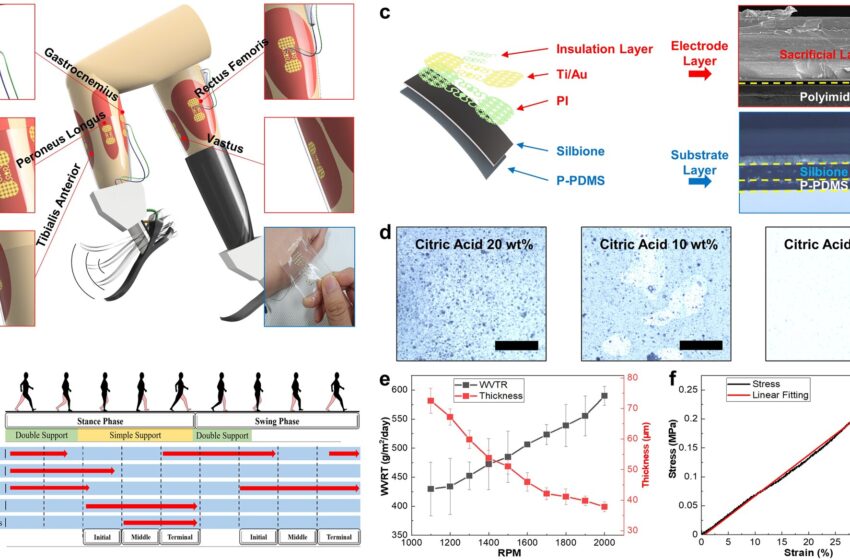
Illustration schématique des capteurs sEMG flexibles et extensibles conçus pour les amputés. un capteur sEMG attaché à différents types de muscles des jambes. Les cases rouges montrent des images implémentées graphiquement et la case bleue présente une image du capteur sEMG fabriqué. b Les parties musculaires sont activées à des moments différents selon la phase de marche. c Description spécifique de la couche d'électrode et de la couche de base du capteur sEMG. La ligne pointillée jaune indique la limite de chaque côté. d Surfaces photographiées au microscope de P-PDMS en fonction de la concentration en acide citrique (barre d'échelle, 1 mm). e Graphique pour le test de respirabilité du P-PDMS (e, n = 20 échantillons pour WVTR et n = 3 échantillons pour l'épaisseur, données présentées sous forme de moyenne ± écart-type). f Graphique de la courbe contrainte-déformation de la couche de substrat. La contrainte de traction calculée est de 253,85 kPa et le module d'Young est de 145,38 kPa. Crédit: npj Electronique Flexible (2023). DOI : 10.1038/s41528-023-00282-z
Une équipe de recherche dirigée par le professeur Sang-hoon Lee du Département de génie robotique et mécatronique de l'Institut des sciences et technologies de Daegu Gyeongbuk a développé avec succès un capteur d'électromyographie de surface imperceptive (sEMG). Le capteur est crucial pour permettre aux amputés des membres inférieurs de contrôler les jambes prothétiques robotisées comme ils le souhaitent et devrait contribuer grandement à la réadaptation et à une meilleure qualité de vie.
Avec l’augmentation récente des maladies liées au mode de vie telles que le diabète, le nombre d’amputés des membres inférieurs augmente rapidement. Les effets permanents de l’amputation d’un membre inférieur ne sont pas seulement un handicap physique mais également un handicap psychologique. Pour résoudre ce problème, une technologie bionique des membres inférieurs a été développée ces dernières années pour remplacer une jambe perdue par des prothèses robotisées.
La chose la plus importante dans le développement de jambes prothétiques robotisées est de mettre en œuvre de manière stable la fonction des membres inférieurs telle que prévue par les amputés, et pour ce faire, la capacité d'acquérir rapidement et précisément les signaux biologiques des amputés est requise. La méthode la plus appropriée consiste à utiliser des capteurs sEMG non invasifs ; cependant, ces capteurs sont difficiles à utiliser en pratique.
Le capteur doit être situé à l’intérieur du revêtement en silicone de l’emboîture pour enregistrer les signaux électromyographiques. Cependant, le revêtement en silicone est très étroit, il crée un environnement humide et il est impacté par l’emboîture, qui est soumise à de forts mouvements dynamiques dus au poids d’une jambe prothétique robotisée. Cela rend impossible l’enregistrement stable des signaux biologiques des muscles pendant une période prolongée sans endommager le capteur lui-même.
Dans ce contexte, une équipe de recherche dirigée par le professeur Sang-hoon Lee de la DGIST a développé un capteur sEMG imperceptif, une biointerface formée via un système microélectromécanique. L'étude est publiée dans la revue npj Electronique Flexible.
Le capteur sEMG imperceptif développé par l'équipe de recherche imite une structure serpentine pour offrir flexibilité et élasticité tout en assurant respirabilité et adhérence. Par conséquent, le capteur peut être appliqué à diverses parties amputées du corps et peut être utilisé de manière répétée sur une période de temps prolongée. De plus, combiné à un module sans fil, le capteur obtient des signaux en temps réel générés lorsque les amputés marchent avec des membres prothétiques robotisés, des emboîtures et des revêtements en silicone.
Pour vérifier le fonctionnement du capteur, l'équipe de recherche a attaché le capteur imperceptif sEMG à une personne amputée d'un membre inférieur et a évalué la fonction du capteur en enregistrant les signaux musculaires de la personne amputée. Les résultats ont démontré que le capteur a acquis avec succès des signaux musculaires en temps réel de haute qualité de la personne amputée marchant dans divers environnements (sur un terrain plat, en montée et en descente et dans les escaliers) et a transmis les signaux sans fil pour aider la personne amputée à marcher, comme vérifié à partir du capteur d’analyse de mouvement intégré dans la jambe prothétique robotique.
De plus, en analysant les signaux musculaires générés par la flexion plantaire et la dorsiflexion chez les amputés, l'équipe de recherche a confirmé que les performances d'acquisition sélective des signaux du capteur sEMG imperceptif sont meilleures que celles d'autres capteurs commerciaux. À cet égard, l’équipe de recherche s’attend à ce que le capteur soit appliqué à diverses technologies portables, en plus du contrôle précis des jambes et des mains prothétiques robotiques basé sur des biosignaux.
Le professeur Lee a déclaré : « Bien qu'il y ait plus d'amputés que nous ne le pensons en Corée et dans le monde, il existe de nombreuses restrictions sur les activités et la vie quotidiennes car les jambes prothétiques qui peuvent être contrôlées comme le souhaite l'utilisateur ne sont pas disponibles. recherche, nous continuerons à approfondir nos recherches et, à terme, à développer des membres bioniques capables de mettre en œuvre des fonctions sensorielles et motrices, tout comme celles des membres humains, pour aider les amputés à profiter de toutes les activités de la vie quotidienne.
Plus d'information:
Jaeu Park et al, EMG de surface cutanée imperceptif et réutilisable pour le contrôle neuro-prothétique des membres inférieurs et l'évaluation clinique, npj Electronique Flexible (2023). DOI : 10.1038/s41528-023-00282-z
Fourni par l'Institut des sciences et technologies de Daegu Gyeongbuk (DGIST)
Citation: Une équipe de recherche développe une nouvelle technologie pour le contrôle robotique des jambes prothétiques (11 décembre 2023) récupéré le 11 décembre 2023 sur
Ce document est soumis au droit d'auteur. En dehors de toute utilisation équitable à des fins d'étude ou de recherche privée, aucune partie ne peut être reproduite sans autorisation écrite. Le contenu est fourni seulement pour information.