Un nouveau modèle pour planifier et contrôler les mouvements des humanoïdes dans des environnements 3D
Planification de trajectoire et contrôle de mouvement PlaMo anime un humanoïde dans une scène 3D complexe. L’entrée consiste en une

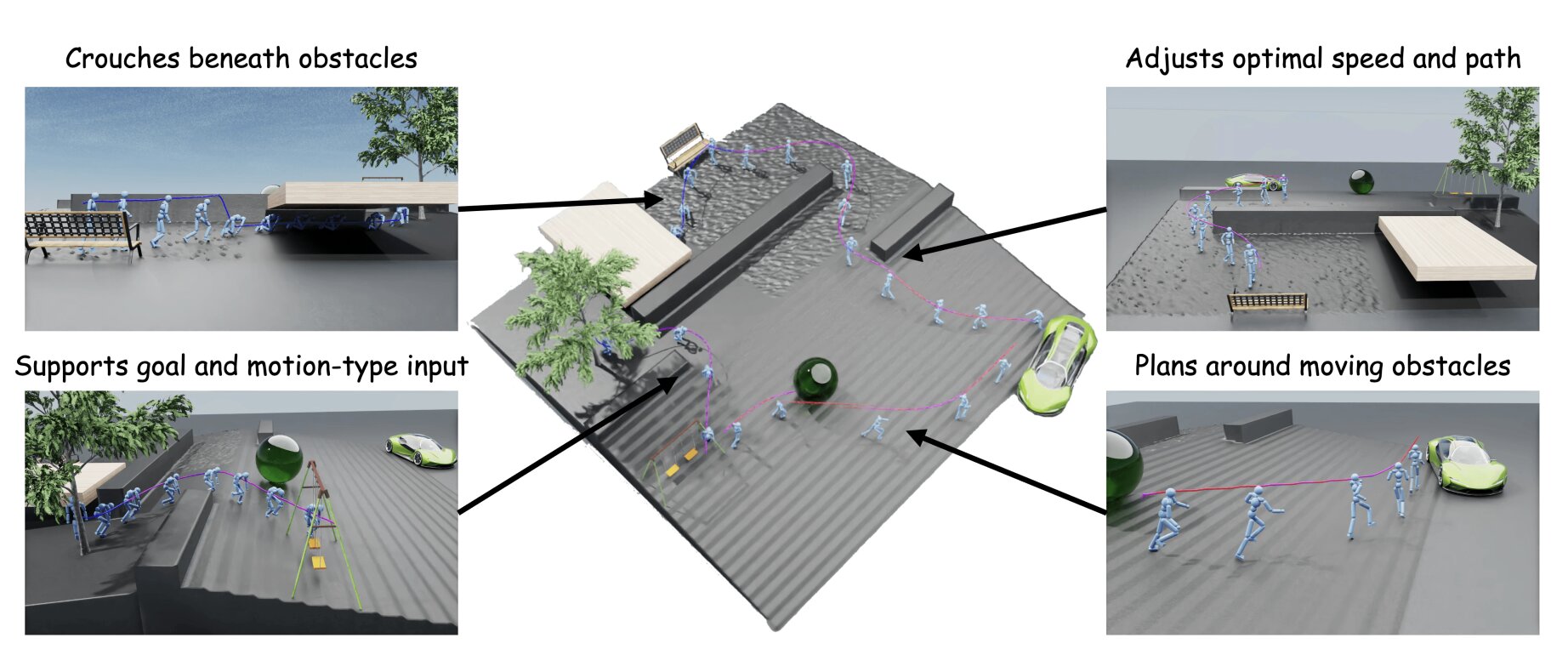
Planification de trajectoire et contrôle de mouvement PlaMo anime un humanoïde dans une scène 3D complexe. L’entrée consiste en une
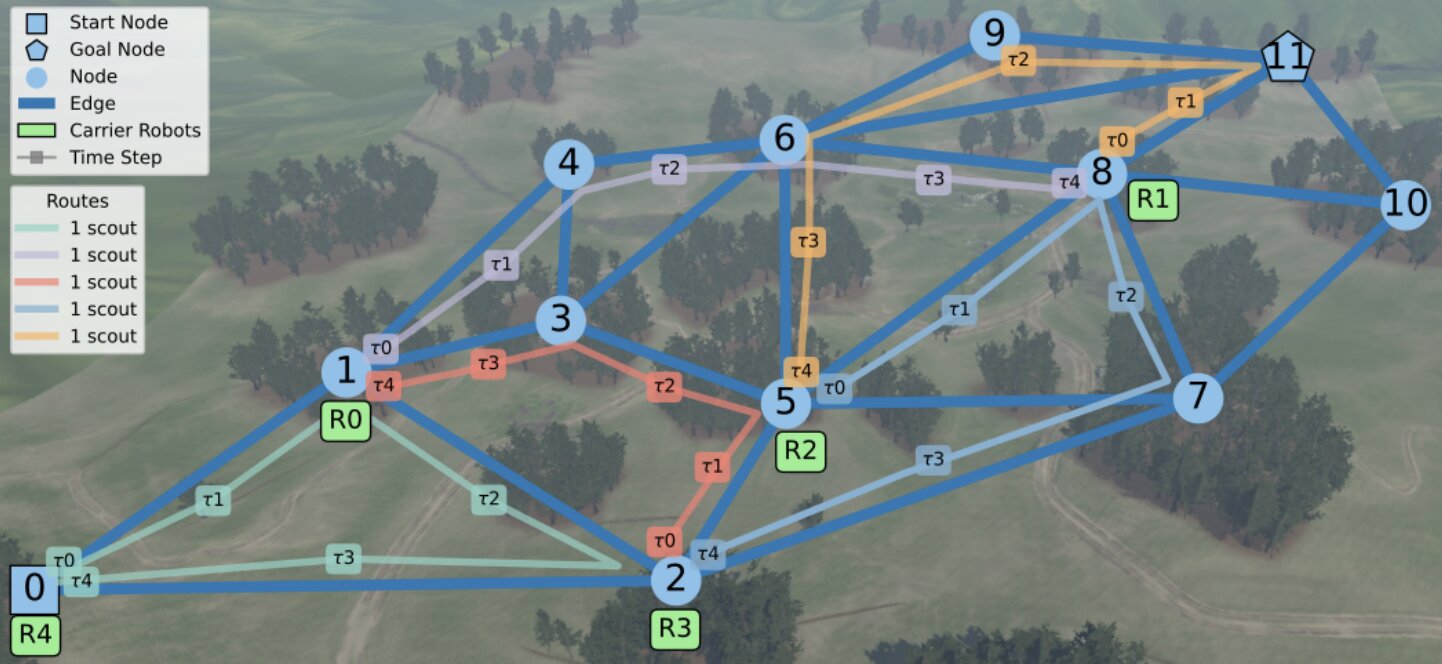
Un exemple de graphique topologique dynamique dans un environnement de prairie avec des poids de bord incertains appliqué à un