Ryad Mezzour sous le feu des critiques après ses propos sur les compétences marocaines
Titre : Ryad Mezzour confronté à des critiques après des propos controversés sur le retour des Marocains Meta description :


Titre : Ryad Mezzour confronté à des critiques après des propos controversés sur le retour des Marocains Meta description :

Pourquoi les fonctionnaires marocains apprendront Amazigh et l’anglais, le ministère de l’économie et des Finances veut renforcer les compétences de

Une scène de jeu dans le monde virtuel de la petite ville. Crédit: Dilks Lab, Université Emory De nombreuses études

Crédit: domaine public Pixabay / CC0 Deux scientifiques de la vie de l’Université nationale de Gyeongsang et un généticien des
Un chien robotique ramassant une balle de tennis sur une pelouse. Crédit : Yuchen Song/UC San Diego. Les robots quadrupèdes
Les modèles linguistiques peuvent développer leur propre compréhension de la réalité afin d’améliorer leurs capacités génératives, ce qui indique qu’ils

Un nouvel algorithme développé par des chercheurs du MIT CSAIL aide les robots à s’entraîner seuls à certaines compétences. Dans
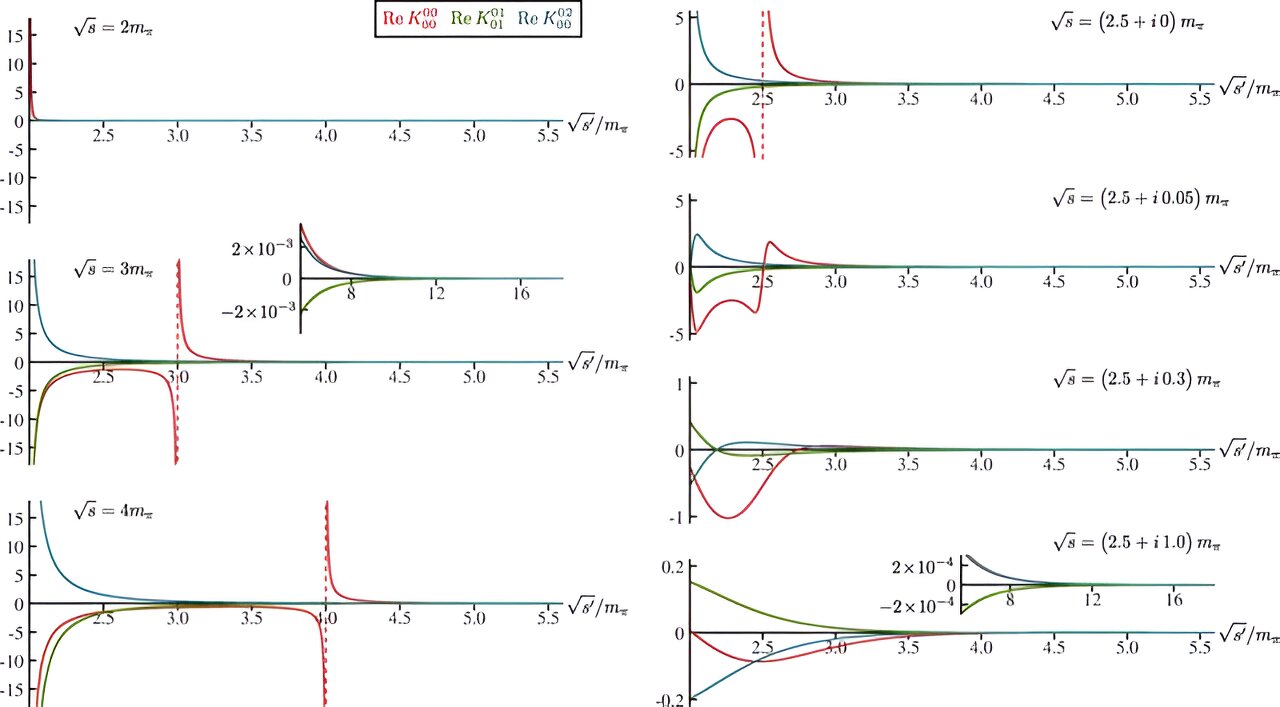
Partie réelle des fonctions du noyau contribuant à la dispersion de S0, Re K0ℓ′0Je′représenté en unités où 1 sur l’axe

Crédit : Unsplash/CC0 Domaine public La pandémie de COVID-19 a exacerbé les taux d’épuisement professionnel déjà croissants parmi les travailleurs

Une majorité des responsables du recrutement préféreraient embaucher un candidat ayant moins d'années d'expérience professionnelle pertinente mais plus d'expérience en