Une nouvelle méthode permet à l’IA d’apprendre indéfiniment
Perte de plasticité dans Continual ImageNet. Crédit : Nature (2024). DOI : 10.1038/s41586-024-07711-7 Une équipe de chercheurs en intelligence artificielle et

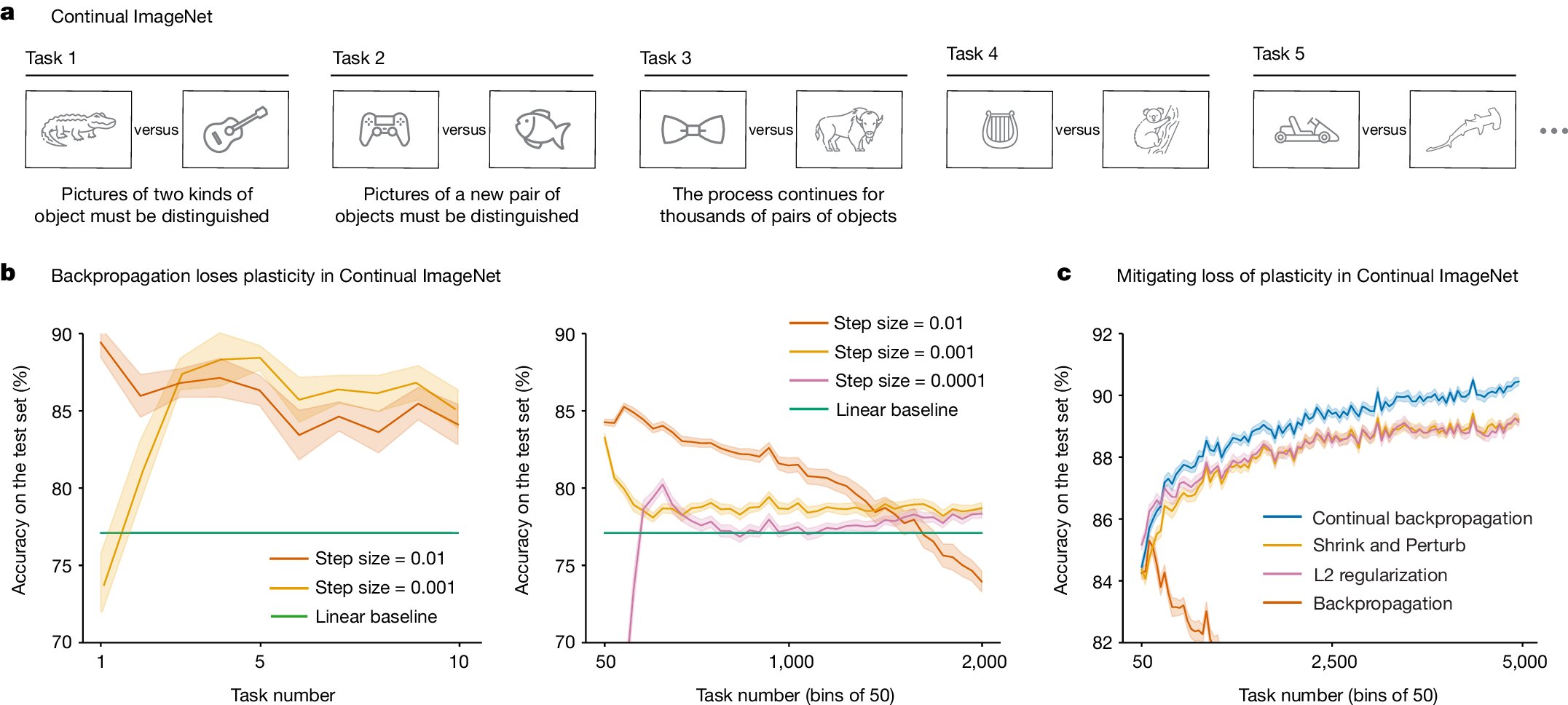
Perte de plasticité dans Continual ImageNet. Crédit : Nature (2024). DOI : 10.1038/s41586-024-07711-7 Une équipe de chercheurs en intelligence artificielle et

Notre TieBot proposé effectue une tâche de nouage de cravate. Nous utilisons la simulation de tissu pour récupérer le mouvement
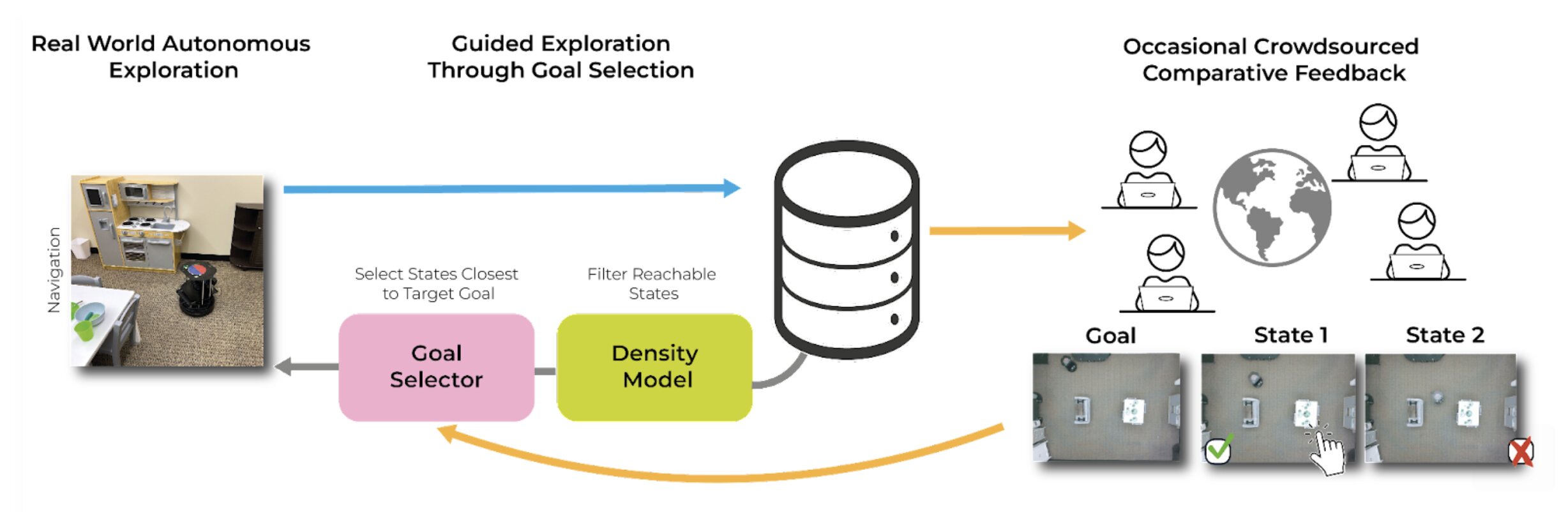
Représentation de l’exploration autonome avec GEAR : la politique alterne entre la tentative d’atteindre un état objectif et le retour à