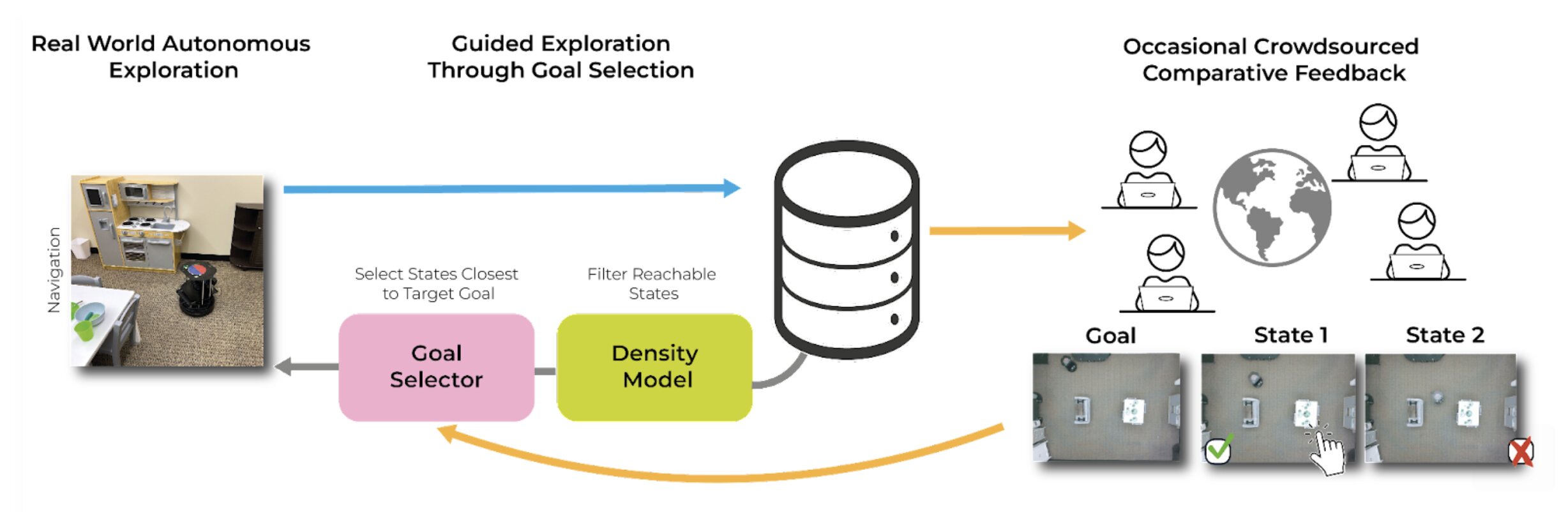
Une approche qui permet aux robots d’apprendre dans des environnements changeants à partir de la rétroaction et de l’exploration humaines
Représentation de l’exploration autonome avec GEAR : la politique alterne entre la tentative d’atteindre un état objectif et le retour à