Un nouveau modèle qui permet aux robots de ré-identifier et de suivre les utilisateurs humains
Pipeline de perception : (a) acquisition d’images RVB et profondeur ; (b) détection de personne via Yolact++ (voir Sect. III-A) ; (c) la

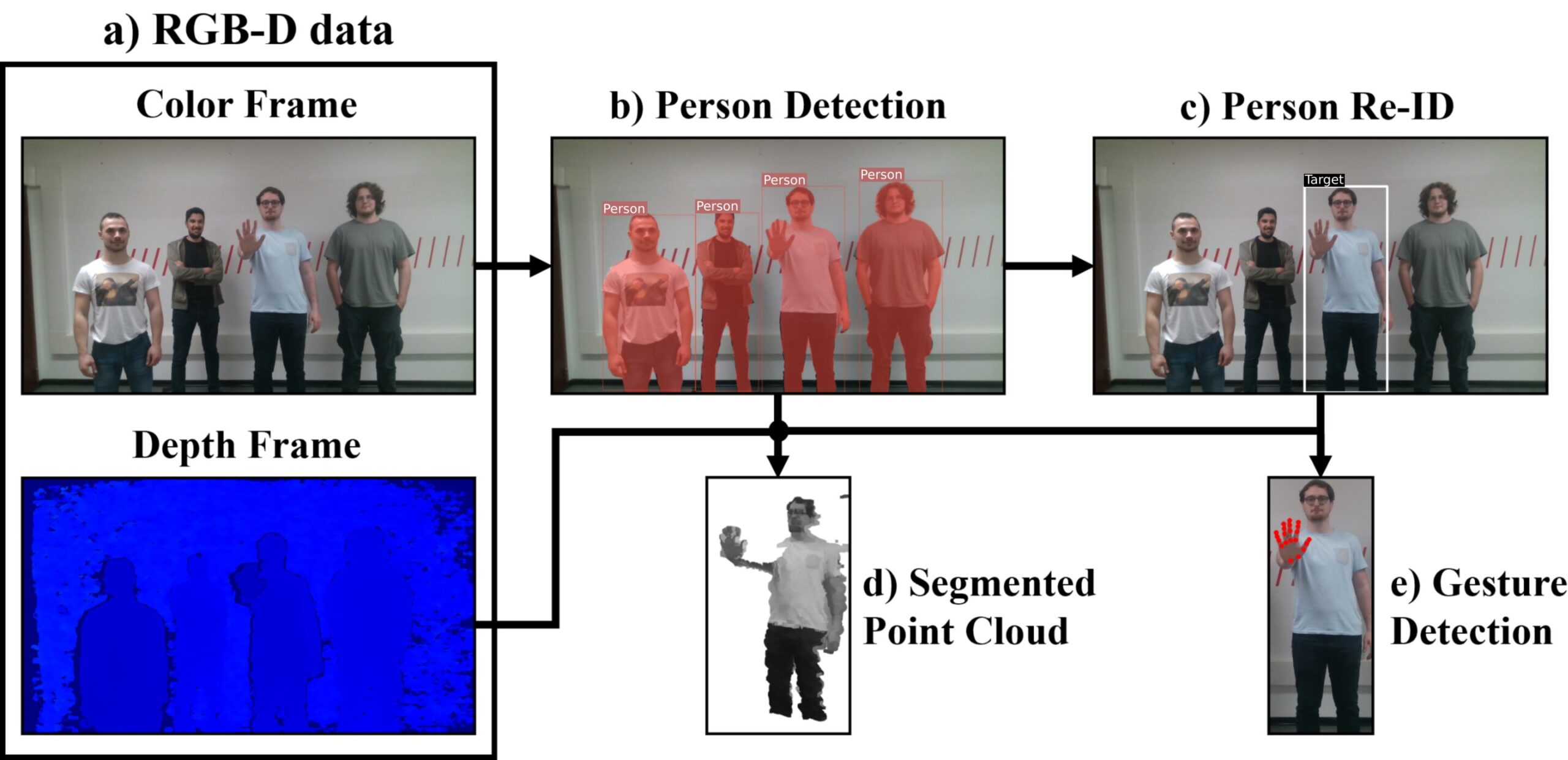
Pipeline de perception : (a) acquisition d’images RVB et profondeur ; (b) détection de personne via Yolact++ (voir Sect. III-A) ; (c) la