Un nouveau système permet la téléopération intuitive d’un manipulateur robotique en temps réel
Le système de téléopération de l’équipe. L’opérateur contrôle la main et le bras du robot à l’aide des positions des

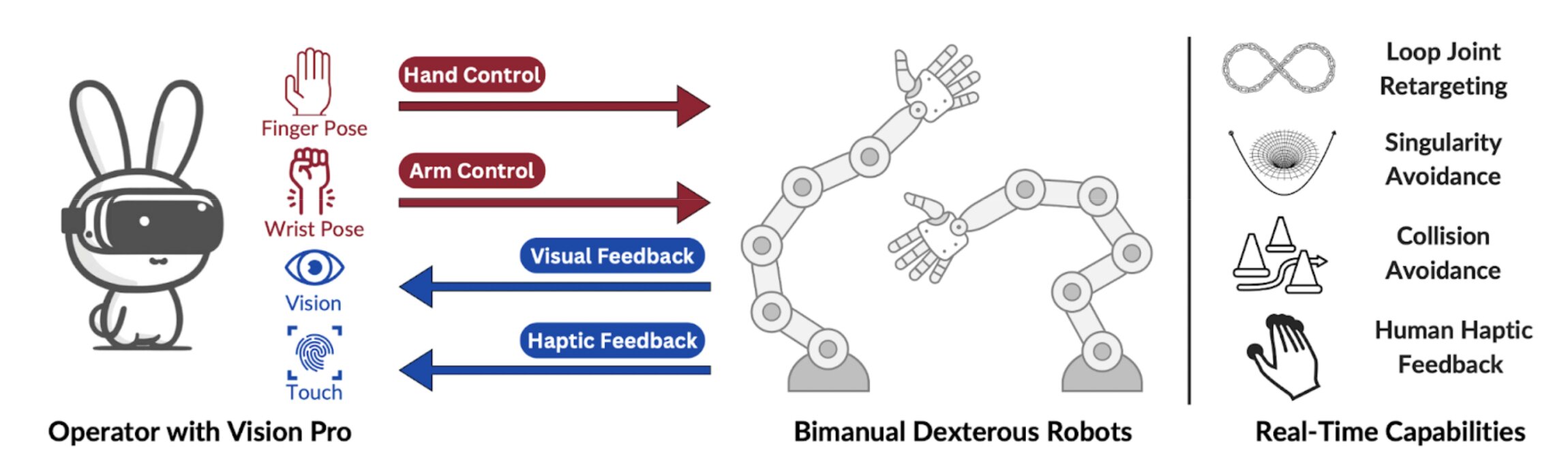
Le système de téléopération de l’équipe. L’opérateur contrôle la main et le bras du robot à l’aide des positions des

L’équipe de l’Université de Bristol a créé une main robotique à quatre doigts dotée de bouts tactiles artificiels, capable de
La première présentation à laquelle j'ai assisté au CES cette année était celle de Nvidia. Il a donné le ton

Le vêtement robotique (ci-dessus), porté autour des hanches et des cuisses, donne une légère poussée aux hanches lorsque la jambe
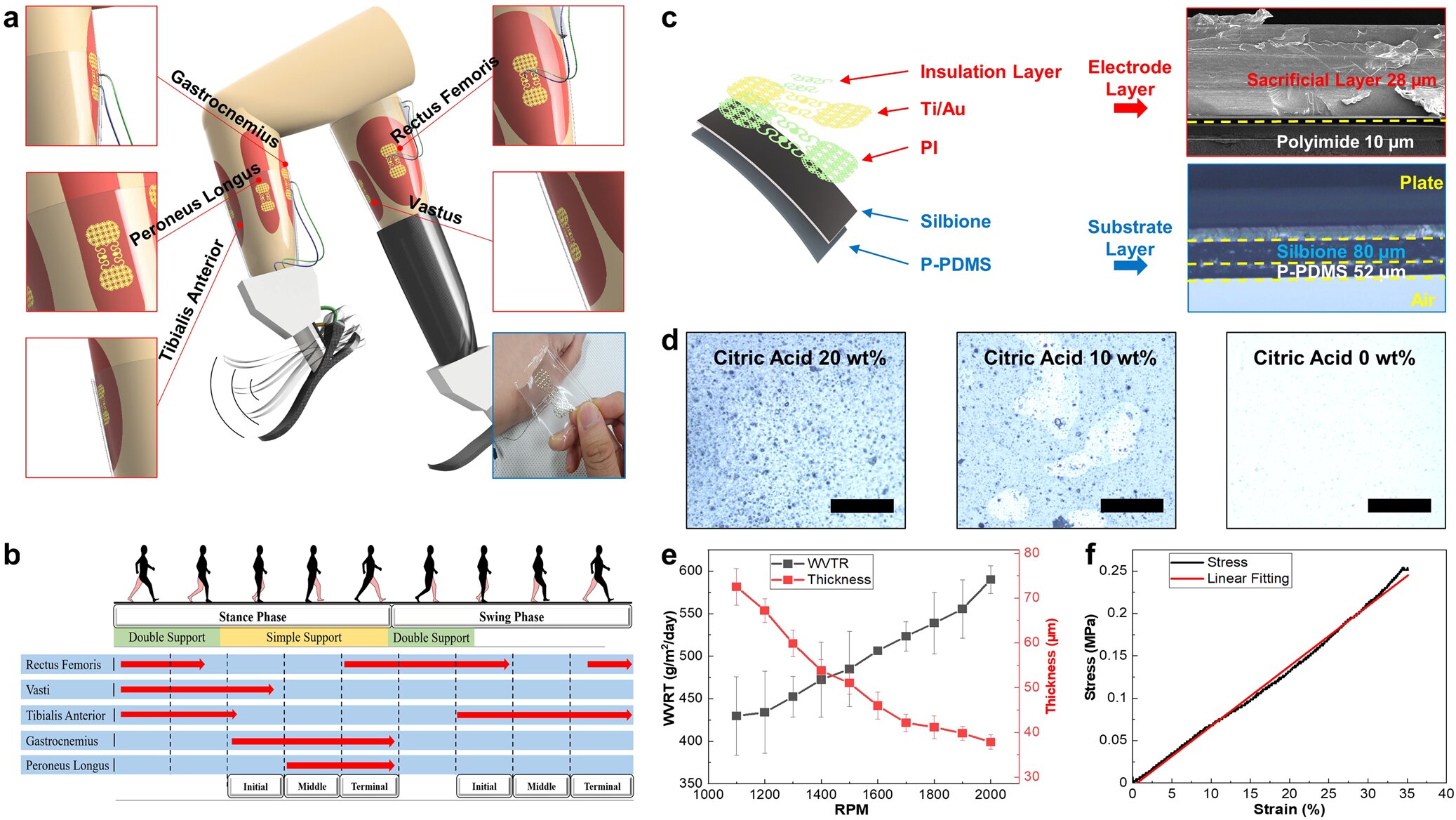
Illustration schématique des capteurs sEMG flexibles et extensibles conçus pour les amputés. un capteur sEMG attaché à différents types de

Flux de travail clinique pour les applications des appareils démontrées. (UN) Le dispositif se déplace vers l'oreillette droite à travers
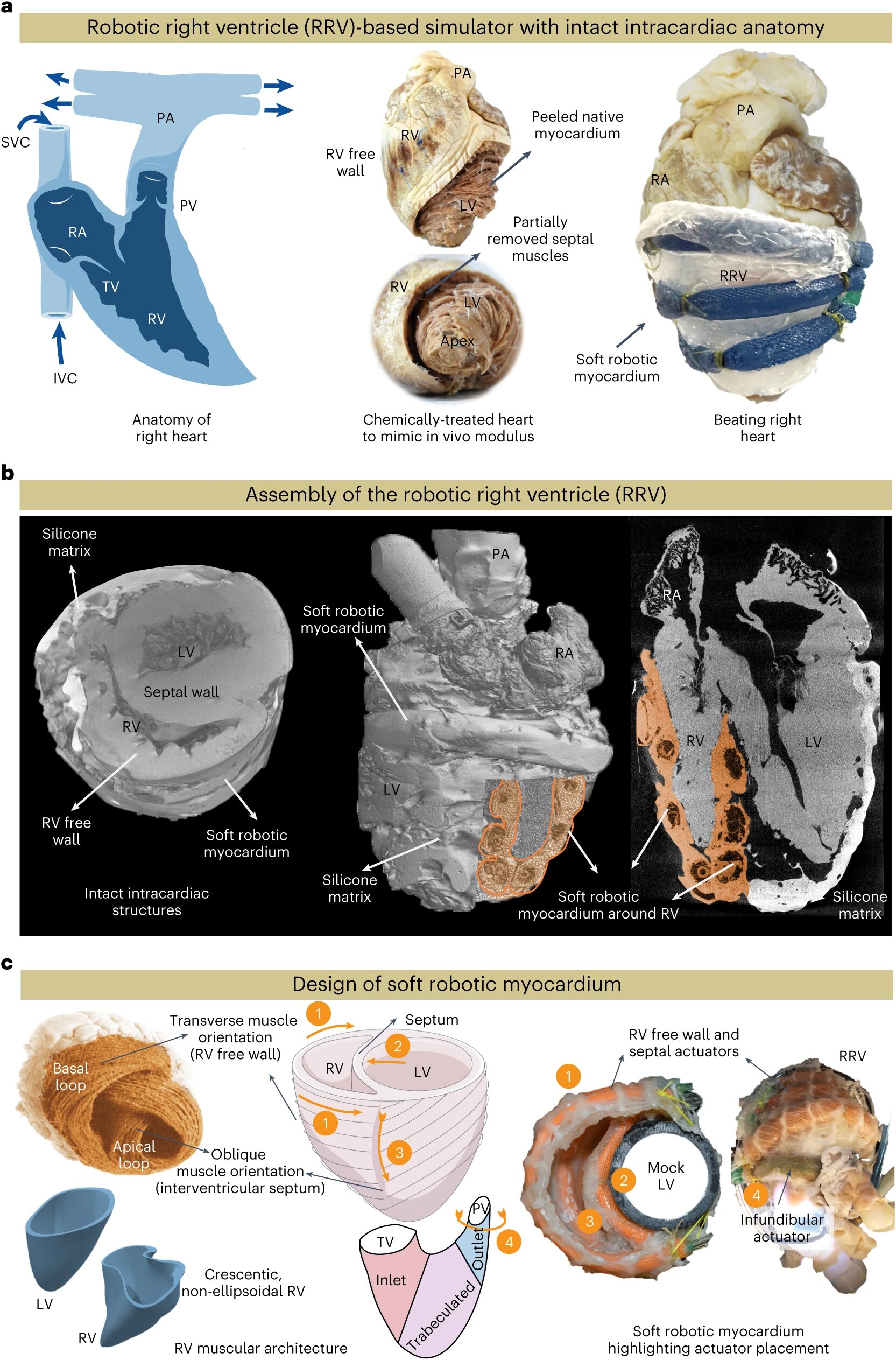
Un aperçu du RRV et de son architecture. a, Aperçu de l’approche bioinspirée et biomimétique utilisée pour créer un cœur
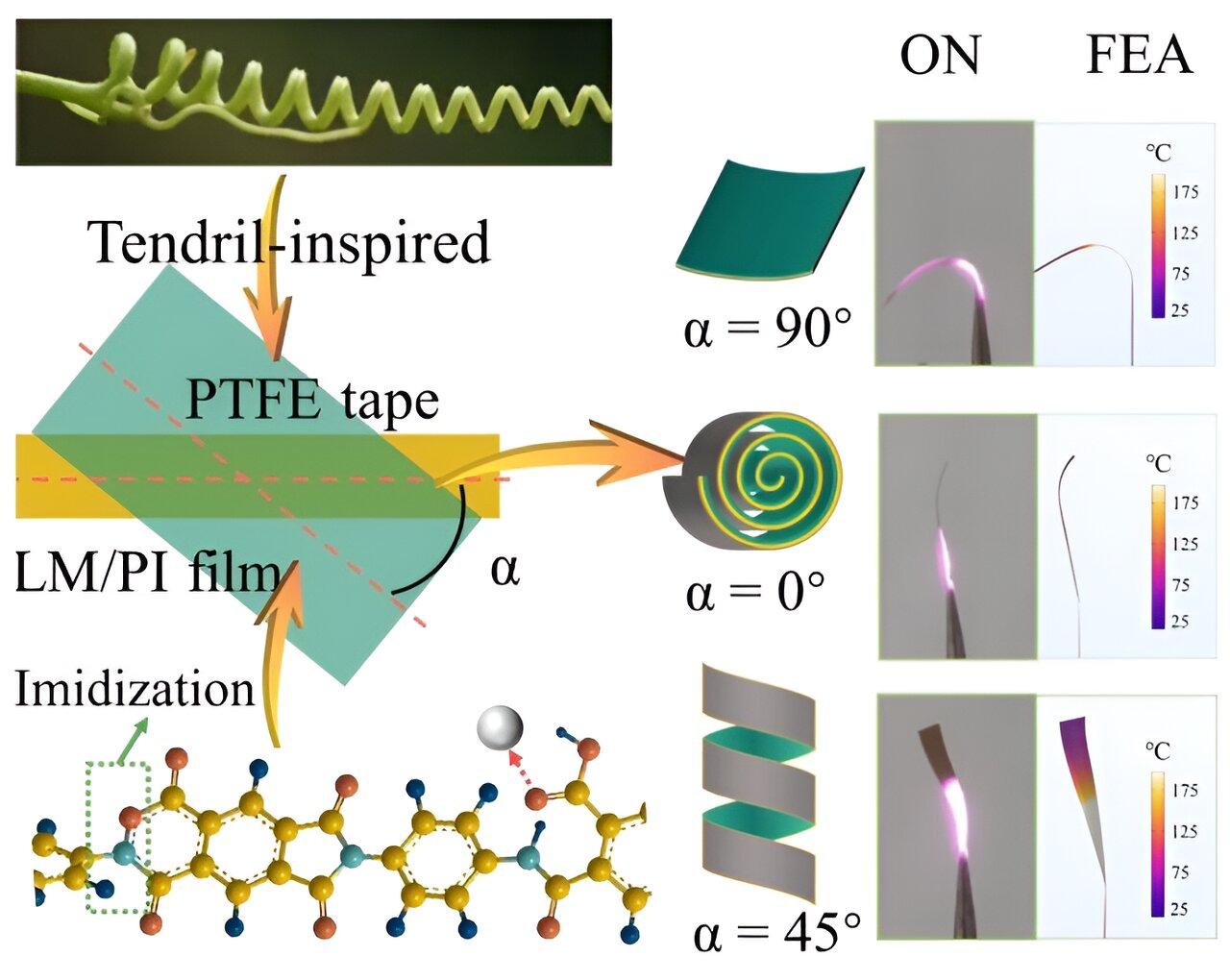
Structure schématique et analyse par éléments finis de l'actionneur photothermique à métal liquide programmable. Crédit : Li Xiaofei Une équipe
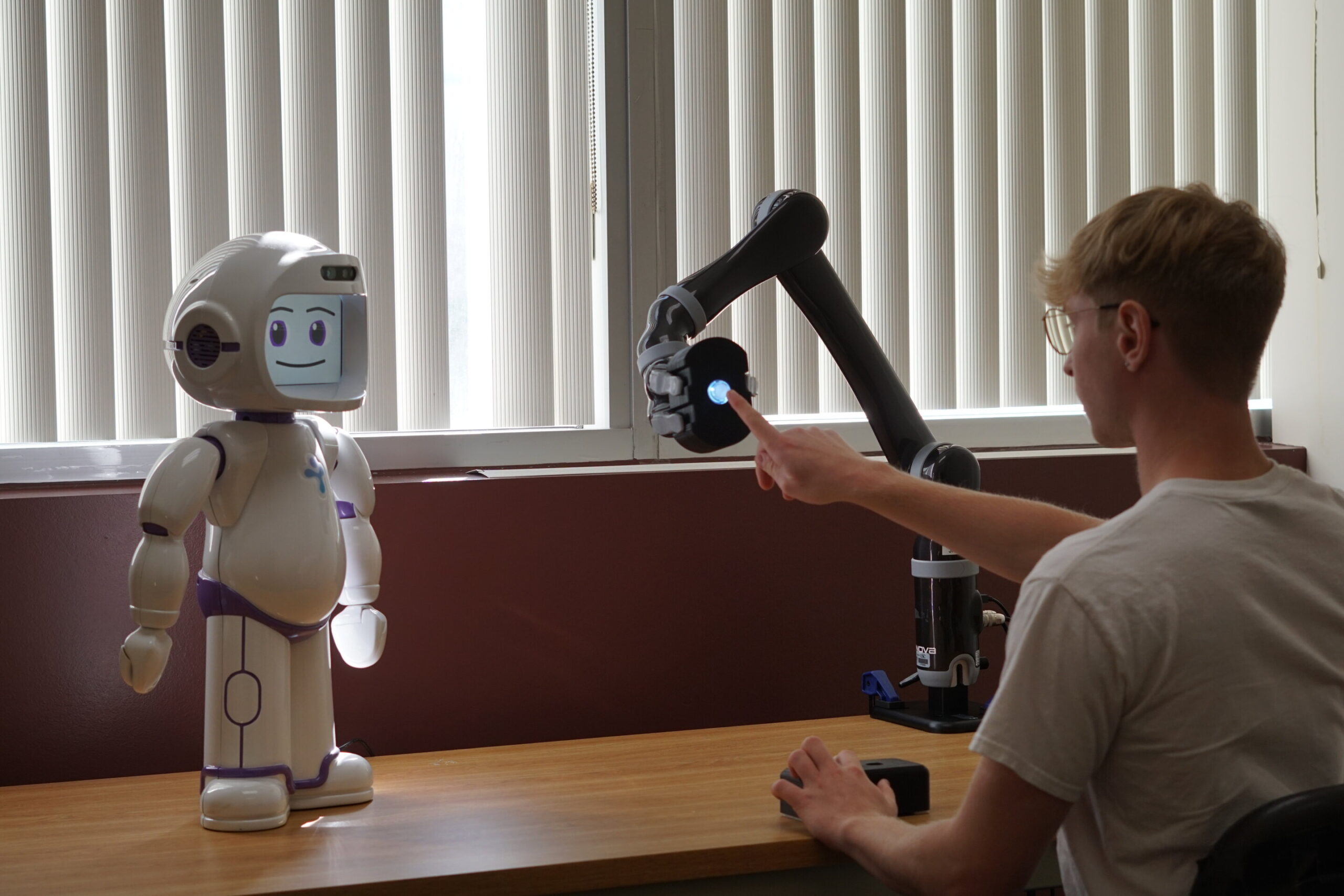
L’auteur principal Nathaniel Dennler, doctorant en informatique, avec le bras robotique, qui fournit des informations spatiales 3D précises, et un
Un gros plan du robot logiciel eViper. Crédit : Bumper DeJesus, Université de Princeton Les chercheurs de Princeton ont développé un