Utiliser des modèles génératifs hiérarchiques pour améliorer le contrôle moteur des robots autonomes
Tâches de manipulation et de locomotion pour valider le modèle génératif hiérarchique. unUne tâche de manipulation, où le robot récupère

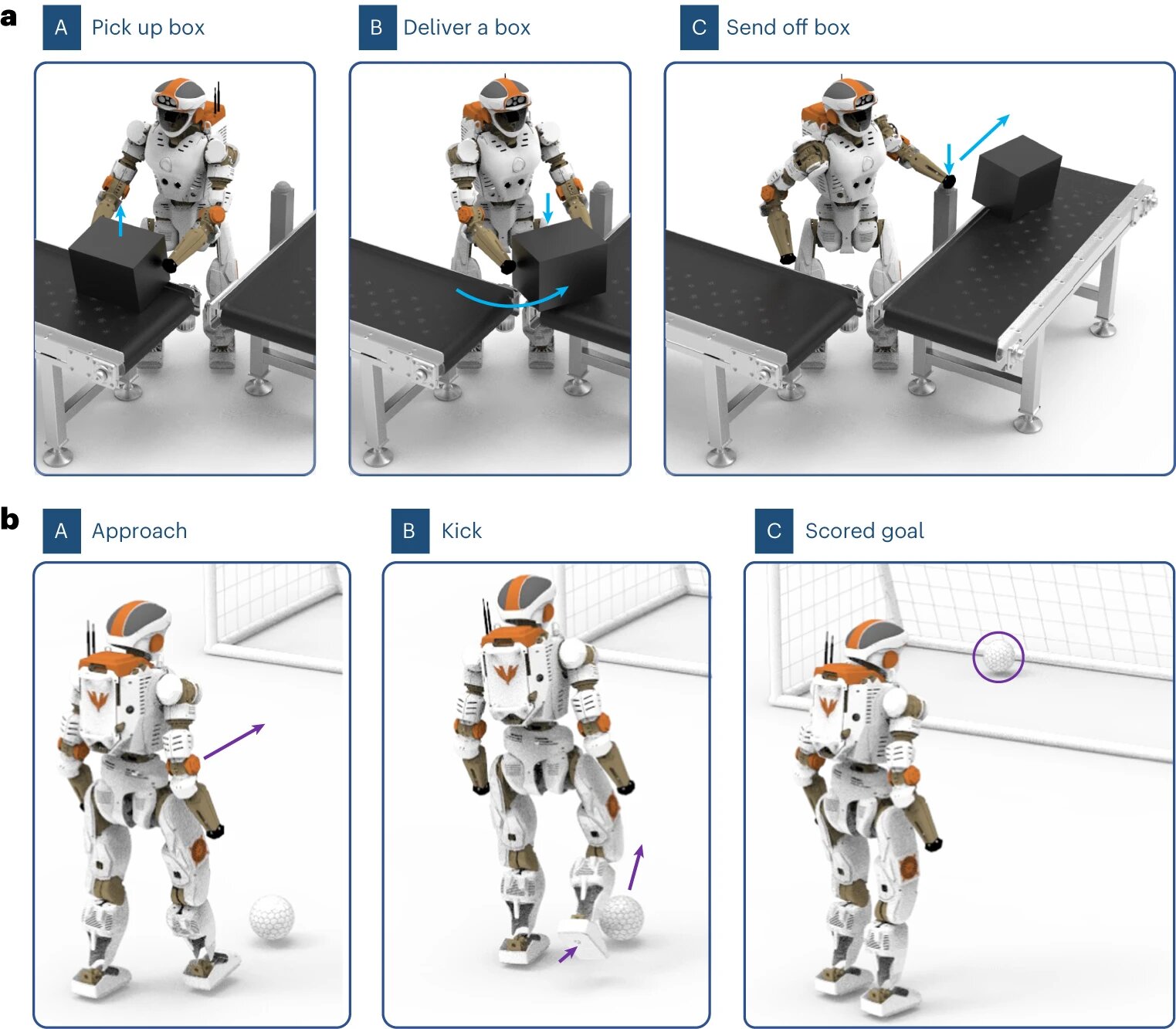
Tâches de manipulation et de locomotion pour valider le modèle génératif hiérarchique. unUne tâche de manipulation, où le robot récupère