Utiliser des modèles génératifs hiérarchiques pour améliorer le contrôle moteur des robots autonomes
Tâches de manipulation et de locomotion pour valider le modèle génératif hiérarchique. unUne tâche de manipulation, où le robot récupère

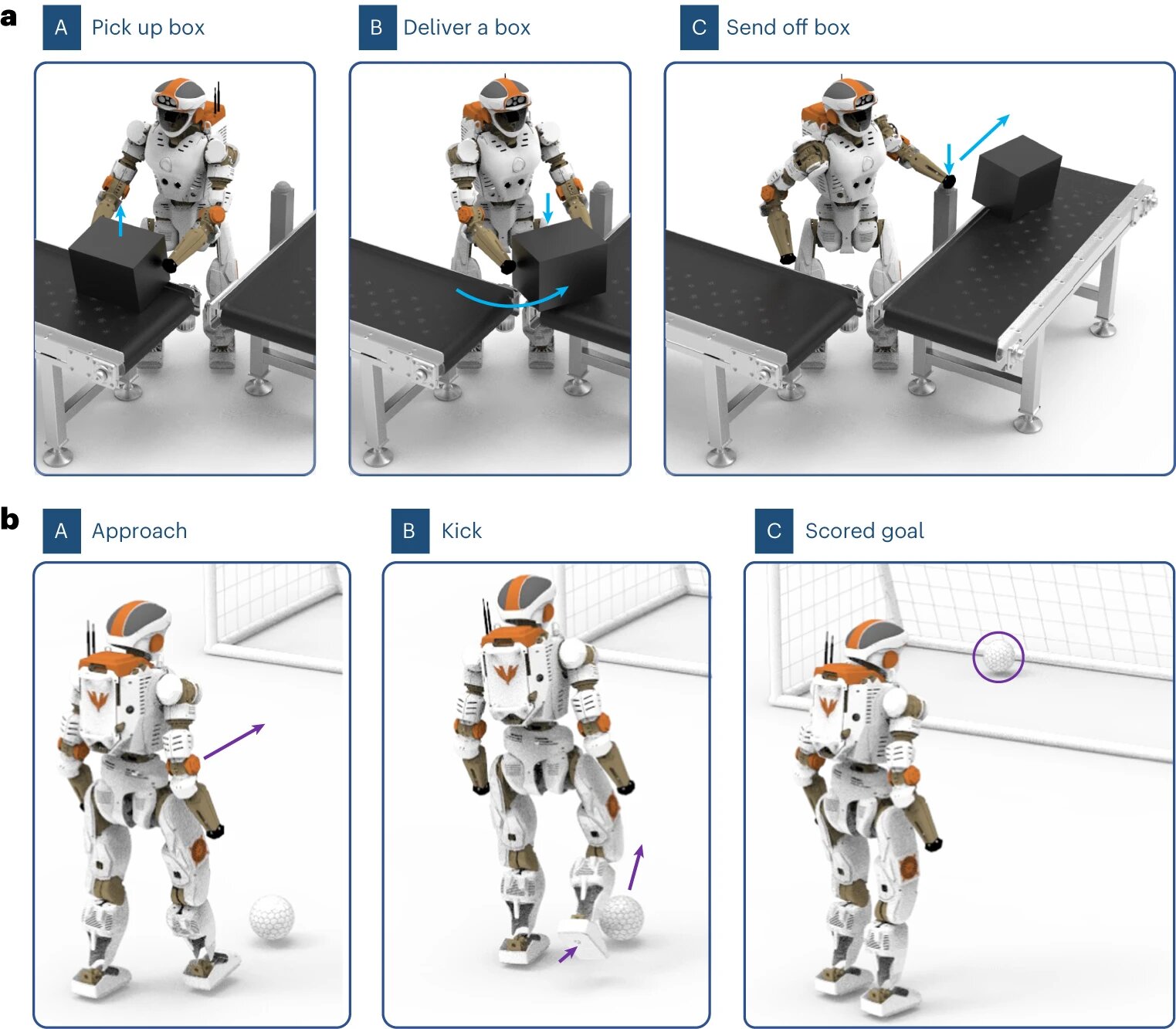
Tâches de manipulation et de locomotion pour valider le modèle génératif hiérarchique. unUne tâche de manipulation, où le robot récupère

Les hamburgers sans viande pourraient être rendus plus savoureux, plus juteux et plus digestes grâce à un traitement protéique-glutaminase. Crédit :

Crédit : Unsplash/CC0 Domaine public Les chercheurs ont développé un algorithme adaptable qui pourrait améliorer la sécurité routière en prédisant
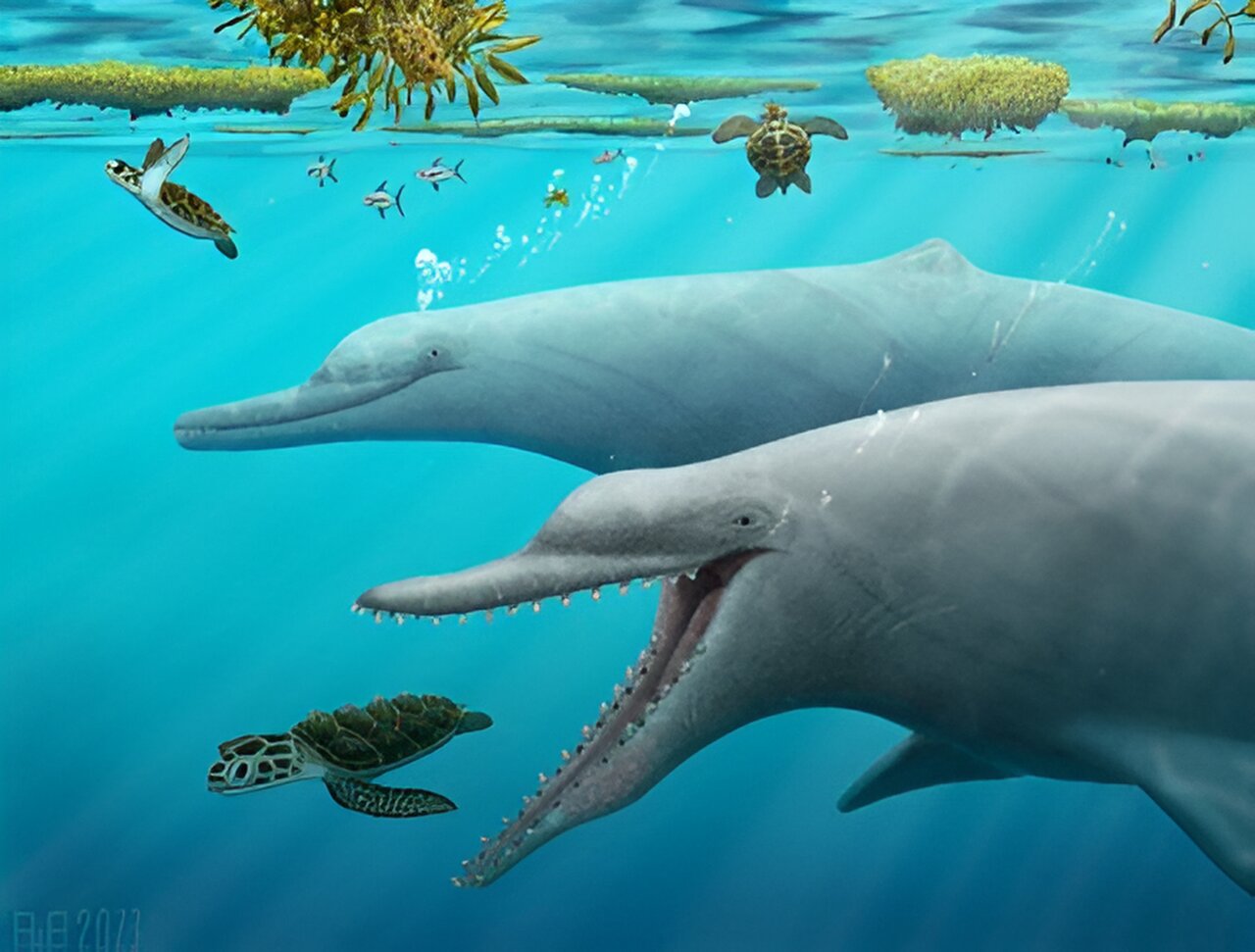
La restauration montre Xenorophus chassant des tortues marines. Crédit : Robert Boessenecker Une étude publiée dans Diversité fournit un nouvel
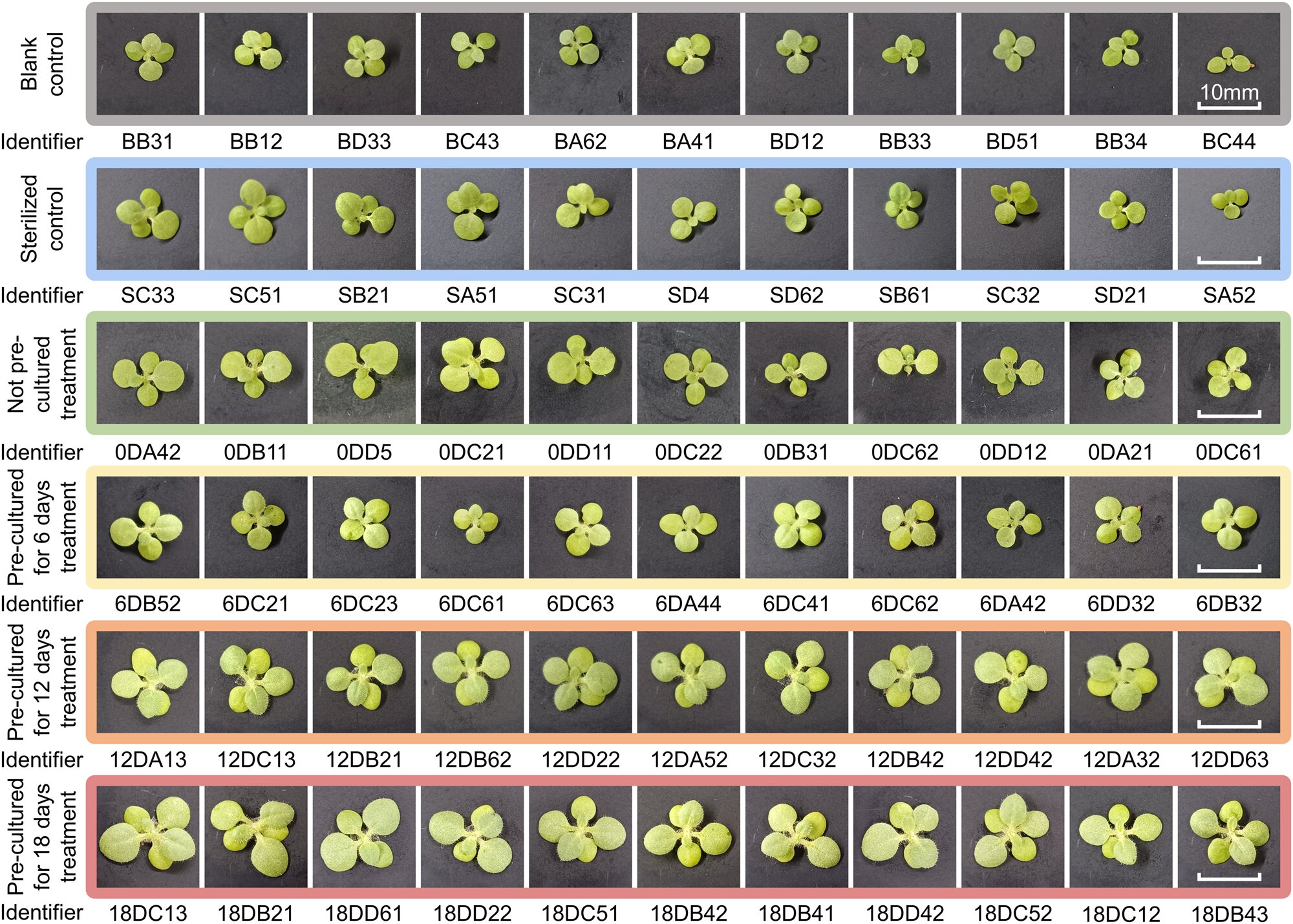
La photographie de plantes partielles dans deux groupes témoins et quatre traitements. Nous avons sélectionné 11 images pour chaque groupe

Une nouvelle technique statistique permet aux chercheurs d’utiliser en toute sécurité les prédictions de l’apprentissage automatique pour tester des hypothèses
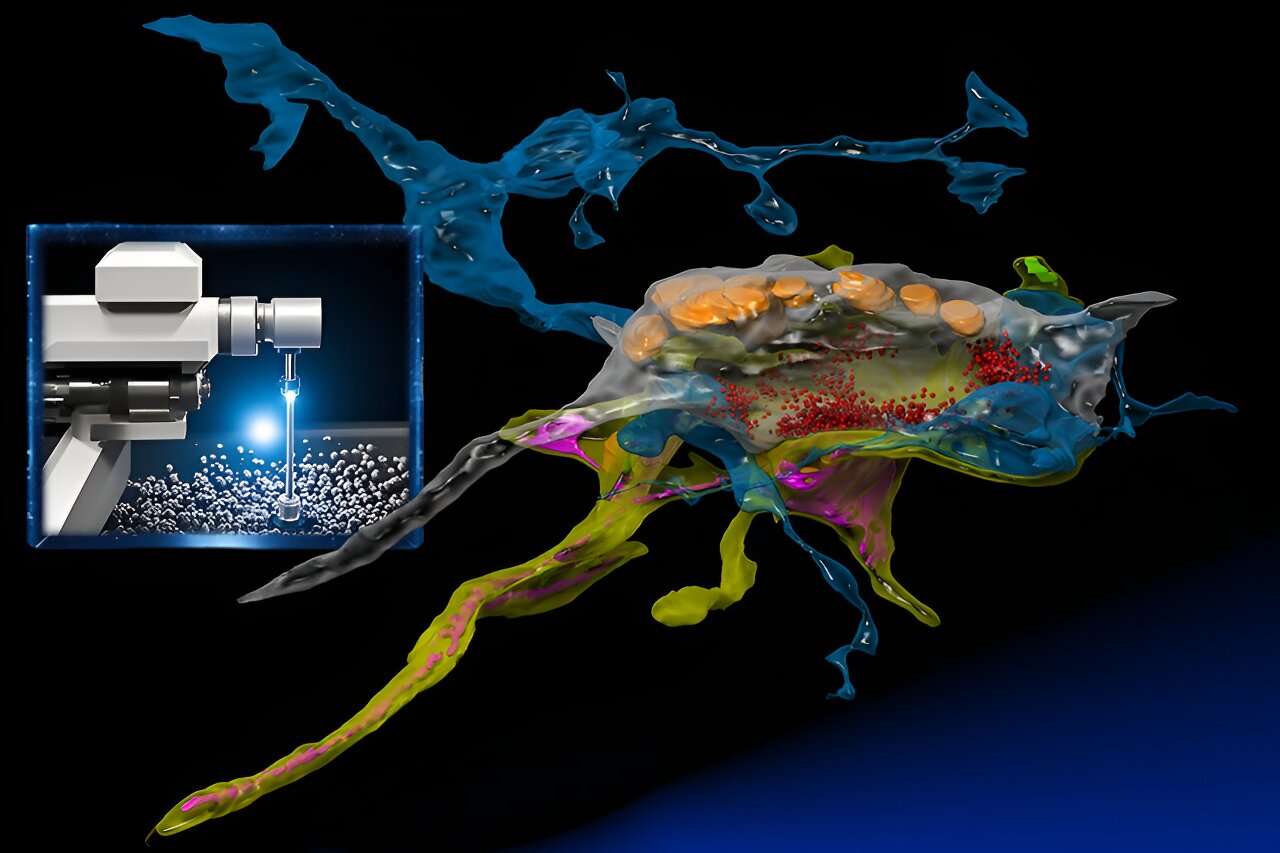
Les chercheurs du MIT ont inventé une technologie et un logiciel pour faire passer la microscopie électronique à un niveau
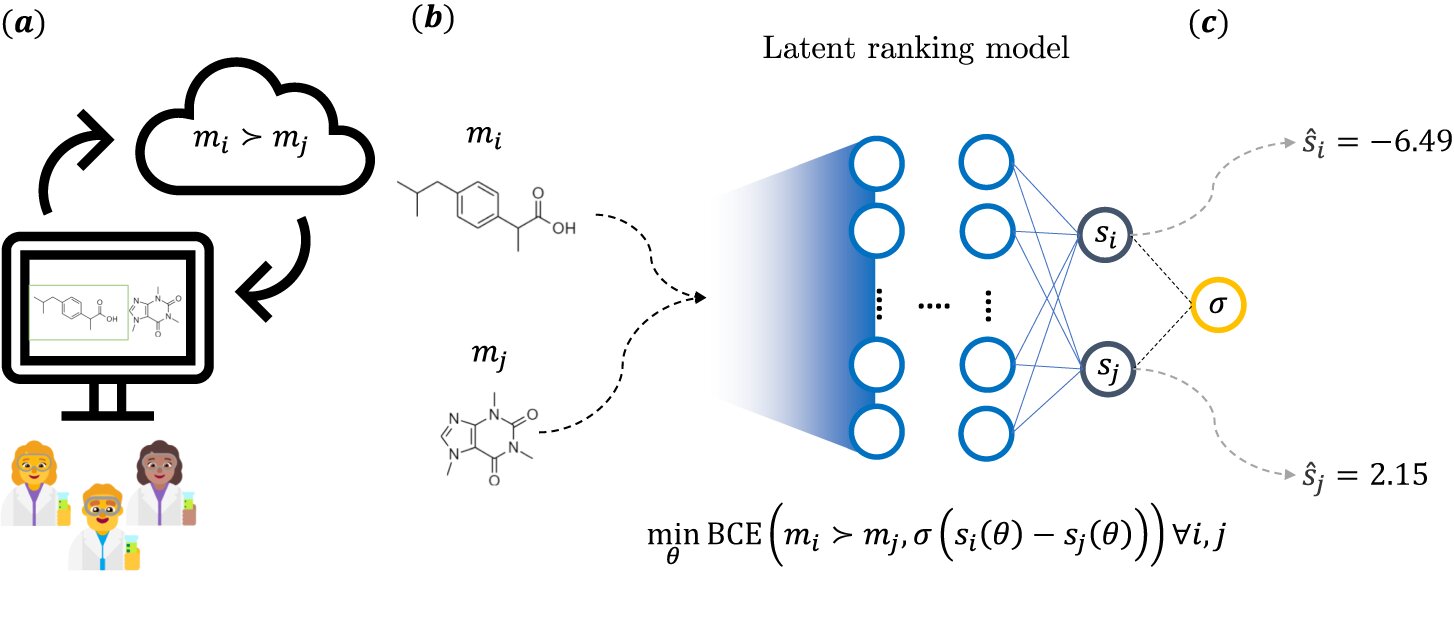
Schéma général de l’idée principale derrière l’étude. un Les molécules sont traitées comme des acteurs dans un jeu compétitif, la
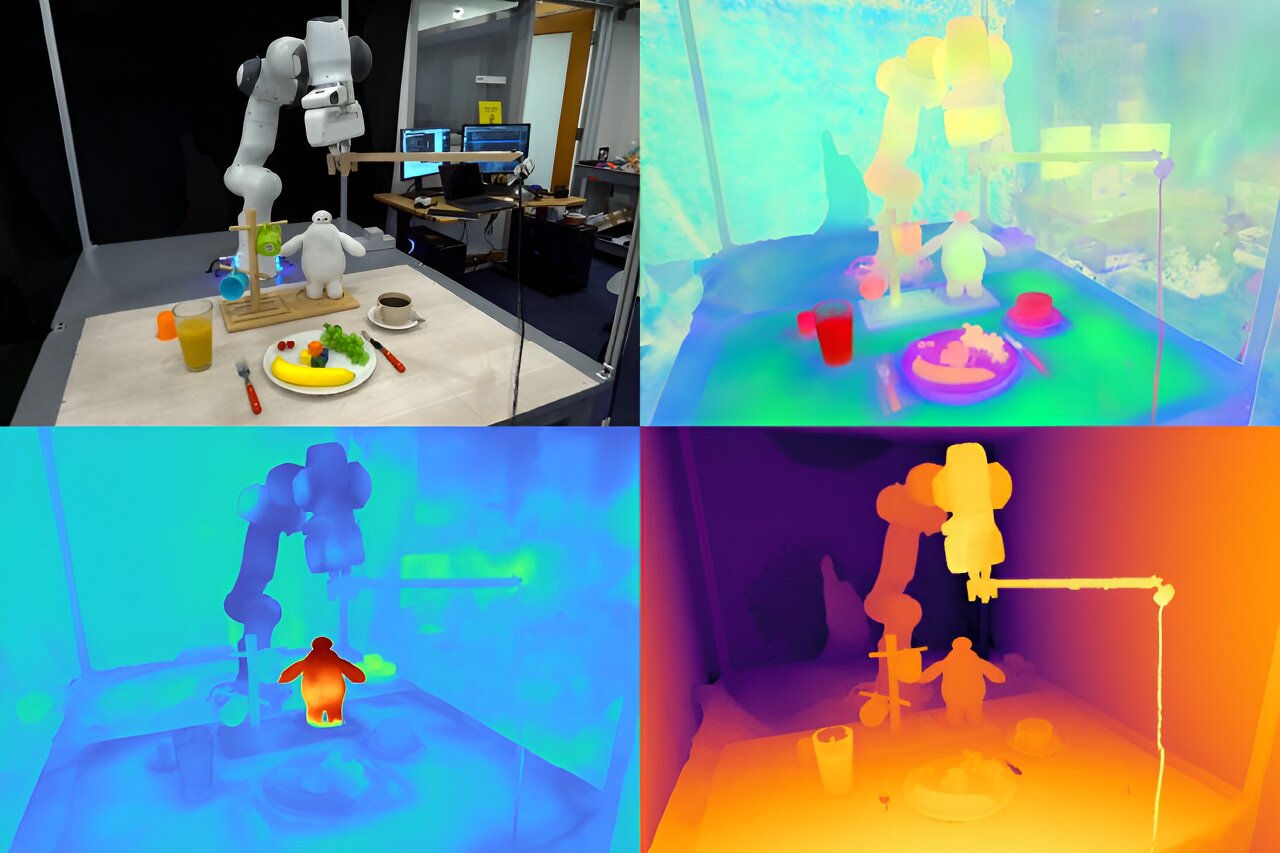
Les champs de fonctionnalités pour la manipulation robotique (F3RM) permettent aux robots d’interpréter des invites de texte ouvertes en langage
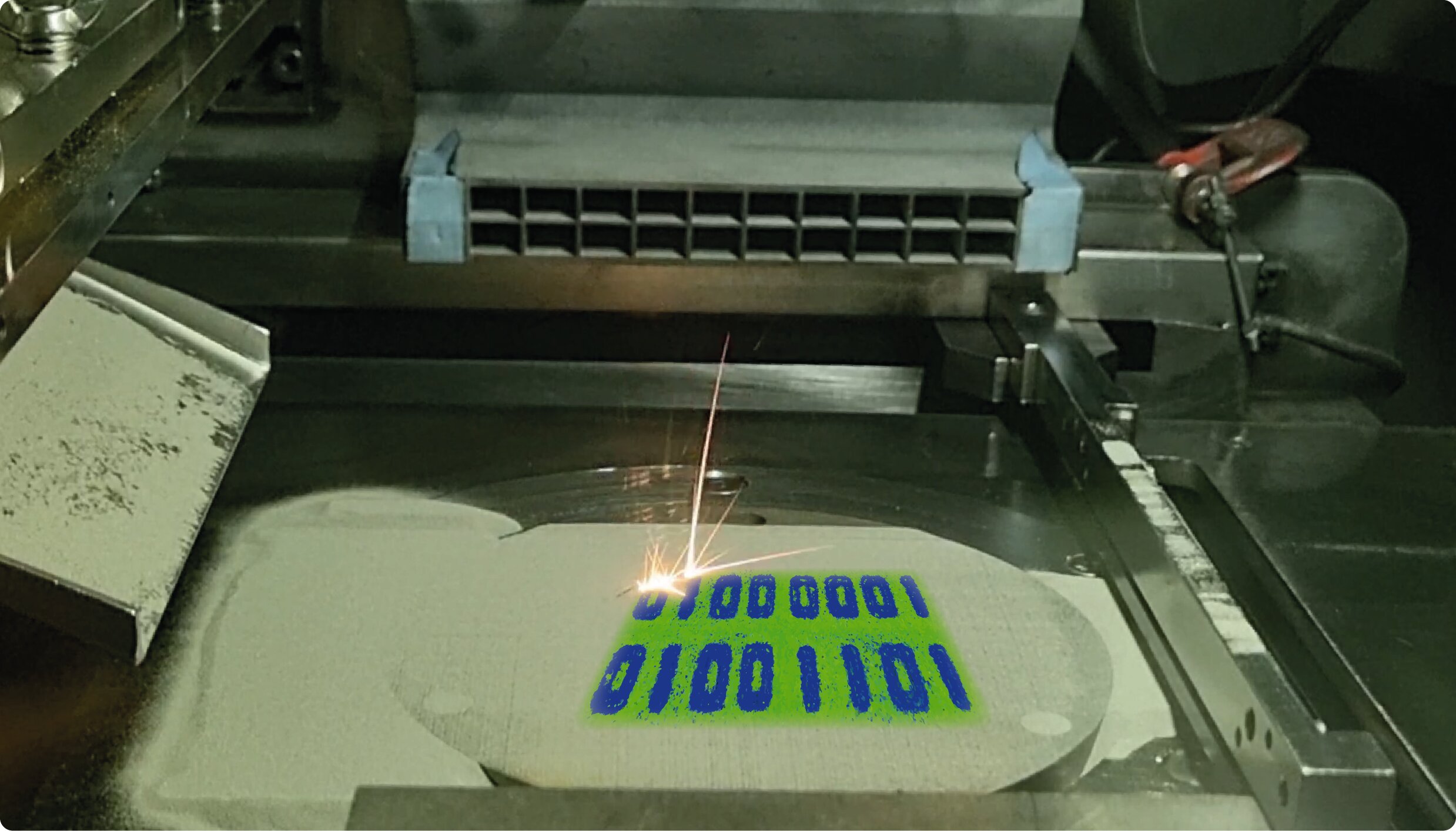
Illustration conceptuelle montrant comment les stratégies de traitement de l’équipe de recherche peuvent être utilisées pour manipuler spatialement la structure