Utiliser le langage pour donner aux robots une meilleure compréhension d’un monde ouvert
Les champs de fonctionnalités pour la manipulation robotique (F3RM) permettent aux robots d’interpréter des invites de texte ouvertes en langage

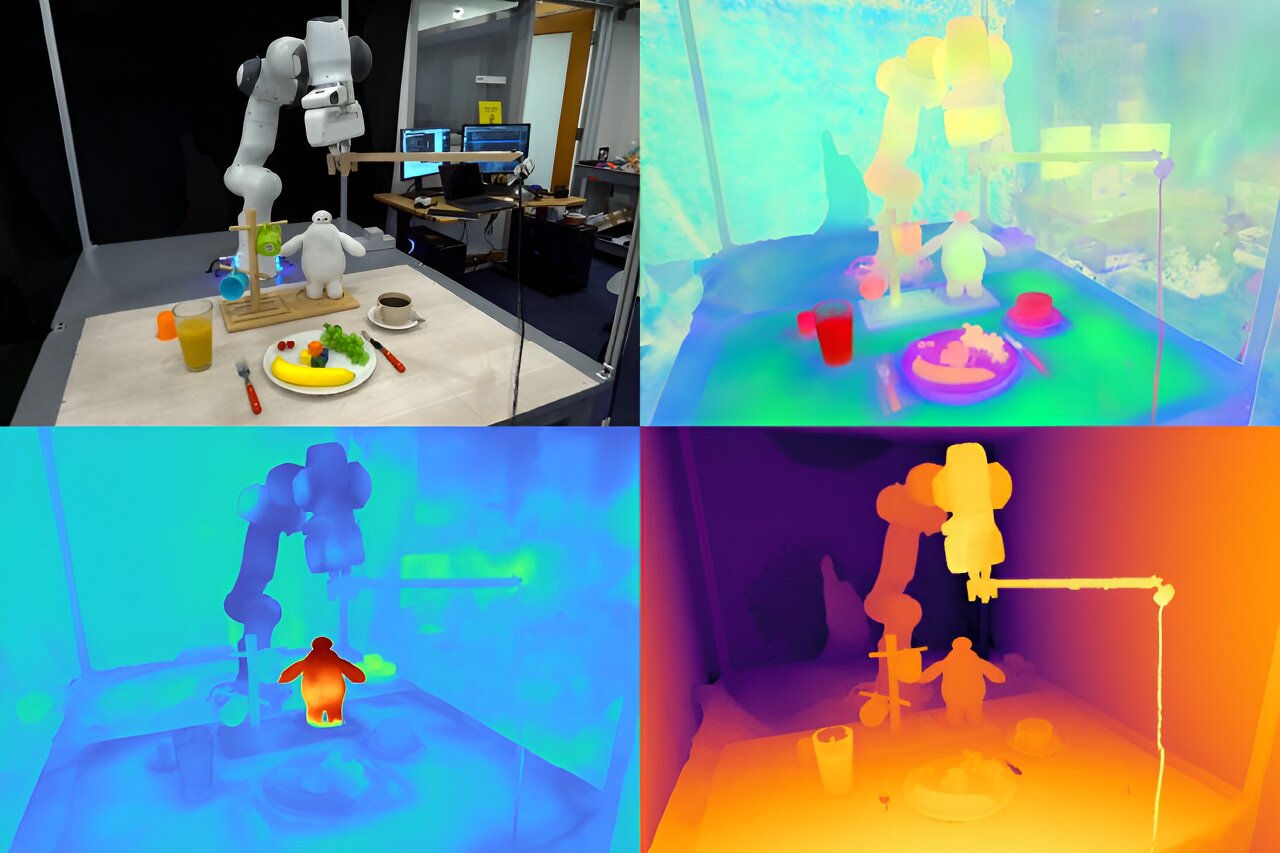
Les champs de fonctionnalités pour la manipulation robotique (F3RM) permettent aux robots d’interpréter des invites de texte ouvertes en langage
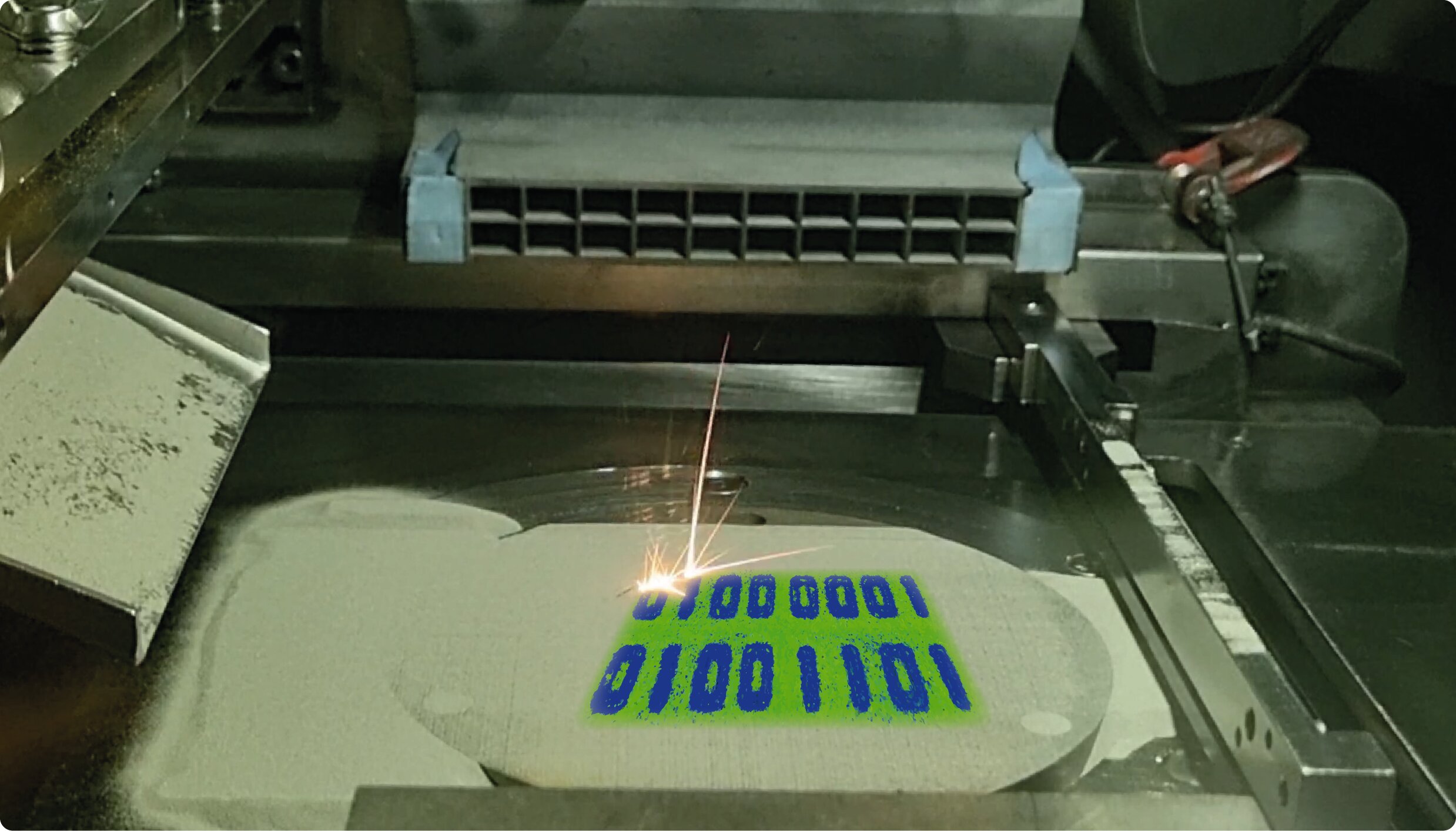
Illustration conceptuelle montrant comment les stratégies de traitement de l’équipe de recherche peuvent être utilisées pour manipuler spatialement la structure
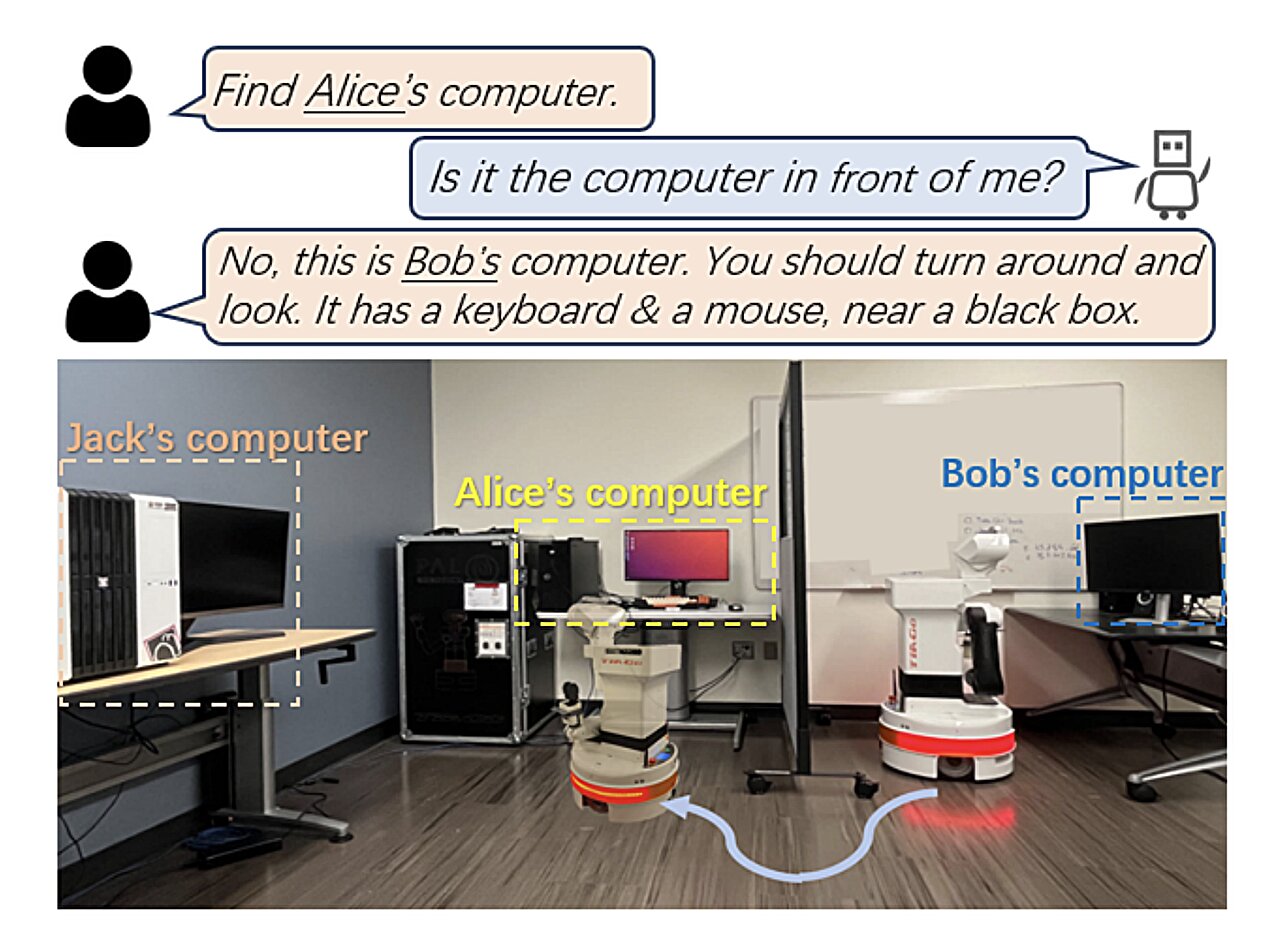
Un exemple de navigation personnalisée interactive sans tir. Il y a trois ordinateurs dans la pièce jamais vus par le

Le robot suit la personne en utilisant uniquement les sons subtils créés lors de ses mouvements silencieux. Le robot fait
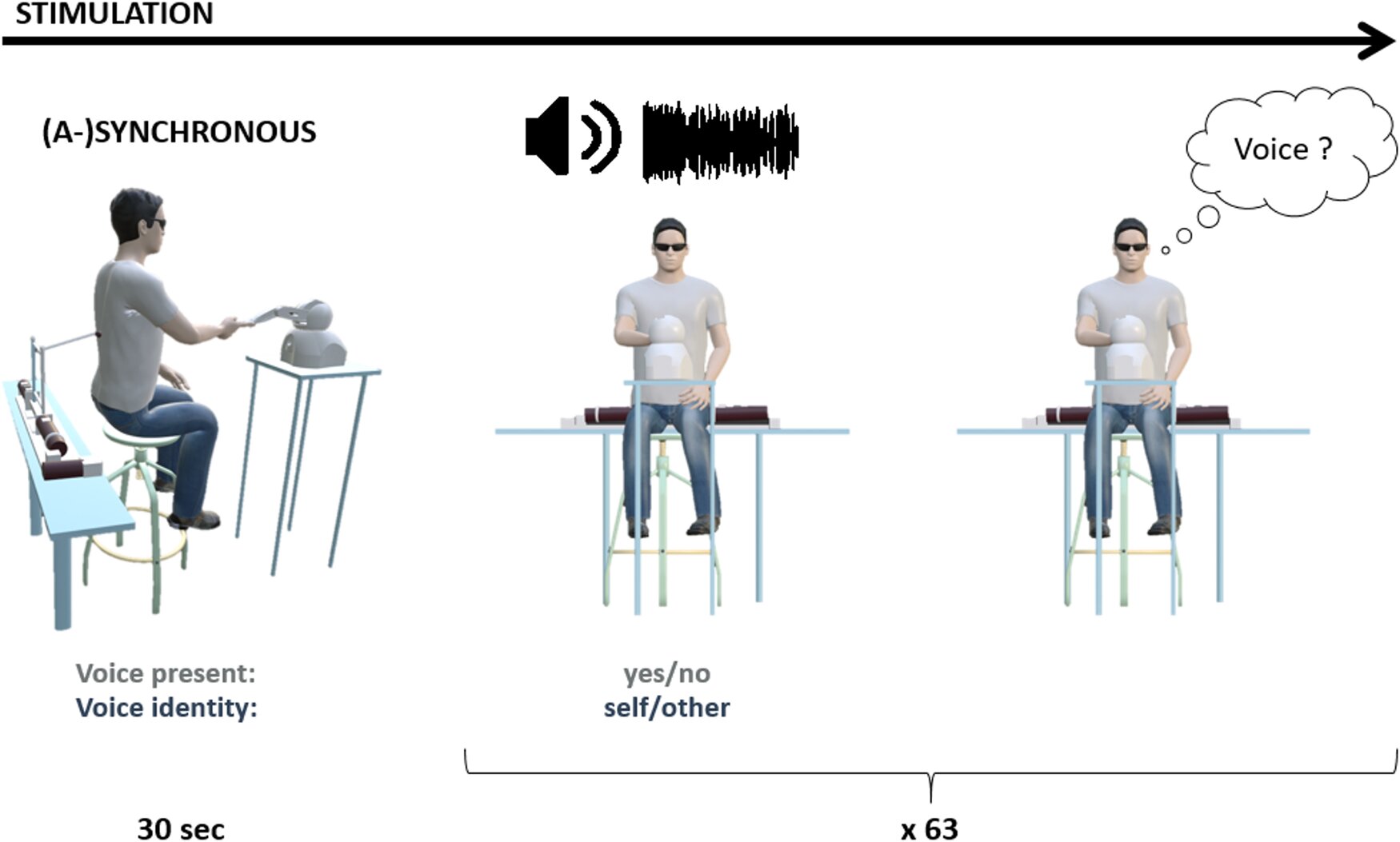
Conception de blocs de tâches. Le bloc a commencé par 30 s de stimulation sensorimotrice, suivies d’une tâche de détection