Une approche pour planifier les actions des équipes robotiques dans des conditions incertaines
Un exemple de graphique topologique dynamique dans un environnement de prairie avec des poids de bord incertains appliqué à un

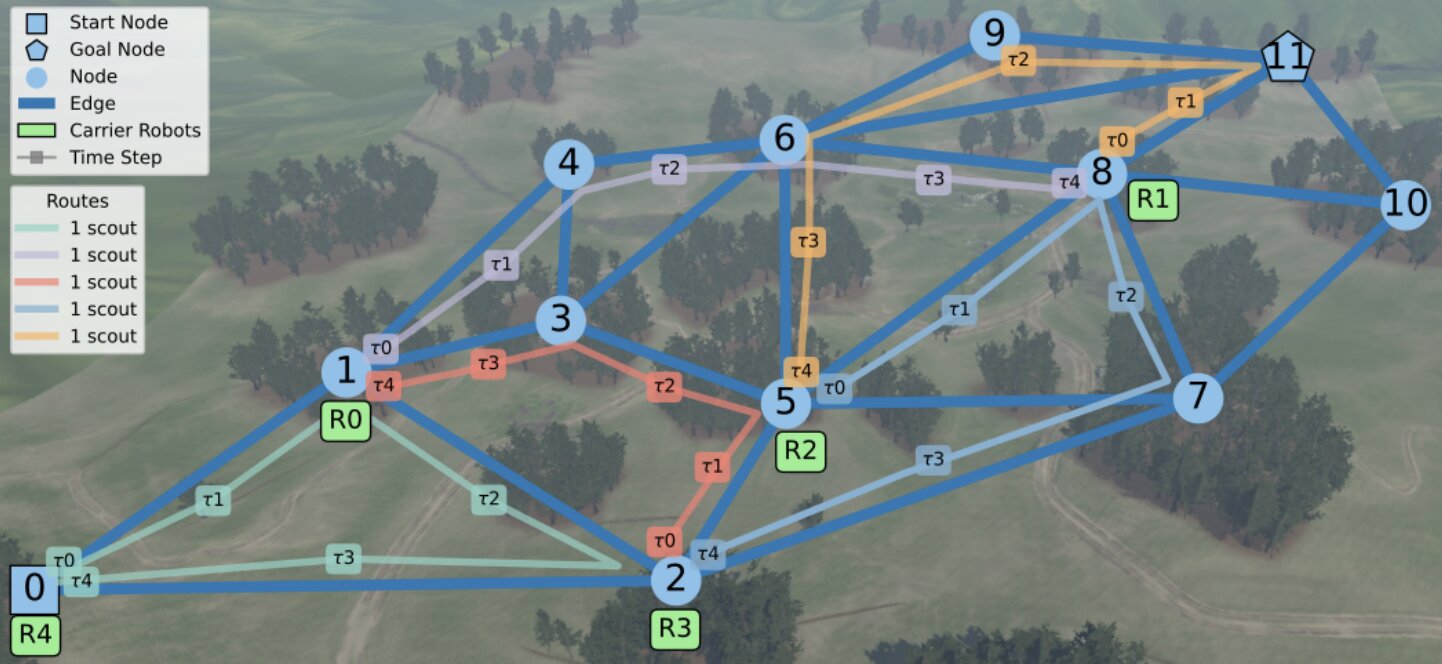
Un exemple de graphique topologique dynamique dans un environnement de prairie avec des poids de bord incertains appliqué à un